S. Conrad, J. Teichmann, P. Auth, N. Knorr, K. Ulrich, D. Bellin, T. Speck, F. J. Tauber
{"title":"用于控制软机器人执行器的 3D 打印数字气动逻辑。","authors":"S. Conrad, J. Teichmann, P. Auth, N. Knorr, K. Ulrich, D. Bellin, T. Speck, F. J. Tauber","doi":"10.1126/scirobotics.adh4060","DOIUrl":null,"url":null,"abstract":"<div >Soft robots are paving their way to catch up with the application range of metal-based machines and to occupy fields that are challenging for traditional machines. Pneumatic actuators play an important role in this development, allowing the construction of bioinspired motion systems. Pneumatic logic gates provide a powerful alternative for controlling pressure-activated soft robots, which are often controlled by metallic valves and electric circuits. Many existing approaches for fully compliant pneumatic control logic suffer from high manual effort and low pressure tolerance. In our work, we invented three-dimensional (3D) printable, pneumatic logic gates that perform Boolean operations and imitate electric circuits. Within 7 hours, a filament printer is able to produce a module that serves as an OR, AND, or NOT gate; the logic function is defined by the assigned input signals. The gate contains two alternately acting pneumatic valves, whose work principle is based on the interaction of pressurized chambers and a 3D-printed 1-millimeter tube inside. The gate design does not require any kind of support material for its hollow parts, which makes the modules ready to use directly after printing. Depending on the chosen material, the modules can operate on a pressure supply between 80 and more than 750 kilopascals. The capabilities of the invented gates were verified by implementing an electronics-free drink dispenser based on a pneumatic ring oscillator and a 1-bit memory. Their high compliance is demonstrated by driving a car over a fully flexible, 3D-printed robotic walker controlled by an integrated circuit.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 86","pages":""},"PeriodicalIF":25.5000,"publicationDate":"2024-01-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adh4060","citationCount":"0","resultStr":"{\"title\":\"3D-printed digital pneumatic logic for the control of soft robotic actuators\",\"authors\":\"S. Conrad, J. Teichmann, P. Auth, N. Knorr, K. Ulrich, D. Bellin, T. Speck, F. J. Tauber\",\"doi\":\"10.1126/scirobotics.adh4060\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div >Soft robots are paving their way to catch up with the application range of metal-based machines and to occupy fields that are challenging for traditional machines. Pneumatic actuators play an important role in this development, allowing the construction of bioinspired motion systems. Pneumatic logic gates provide a powerful alternative for controlling pressure-activated soft robots, which are often controlled by metallic valves and electric circuits. Many existing approaches for fully compliant pneumatic control logic suffer from high manual effort and low pressure tolerance. In our work, we invented three-dimensional (3D) printable, pneumatic logic gates that perform Boolean operations and imitate electric circuits. Within 7 hours, a filament printer is able to produce a module that serves as an OR, AND, or NOT gate; the logic function is defined by the assigned input signals. The gate contains two alternately acting pneumatic valves, whose work principle is based on the interaction of pressurized chambers and a 3D-printed 1-millimeter tube inside. The gate design does not require any kind of support material for its hollow parts, which makes the modules ready to use directly after printing. Depending on the chosen material, the modules can operate on a pressure supply between 80 and more than 750 kilopascals. The capabilities of the invented gates were verified by implementing an electronics-free drink dispenser based on a pneumatic ring oscillator and a 1-bit memory. Their high compliance is demonstrated by driving a car over a fully flexible, 3D-printed robotic walker controlled by an integrated circuit.</div>\",\"PeriodicalId\":56029,\"journal\":{\"name\":\"Science Robotics\",\"volume\":\"9 86\",\"pages\":\"\"},\"PeriodicalIF\":25.5000,\"publicationDate\":\"2024-01-31\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.science.org/doi/reader/10.1126/scirobotics.adh4060\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Science Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.science.org/doi/10.1126/scirobotics.adh4060\",\"RegionNum\":1,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adh4060","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
摘要
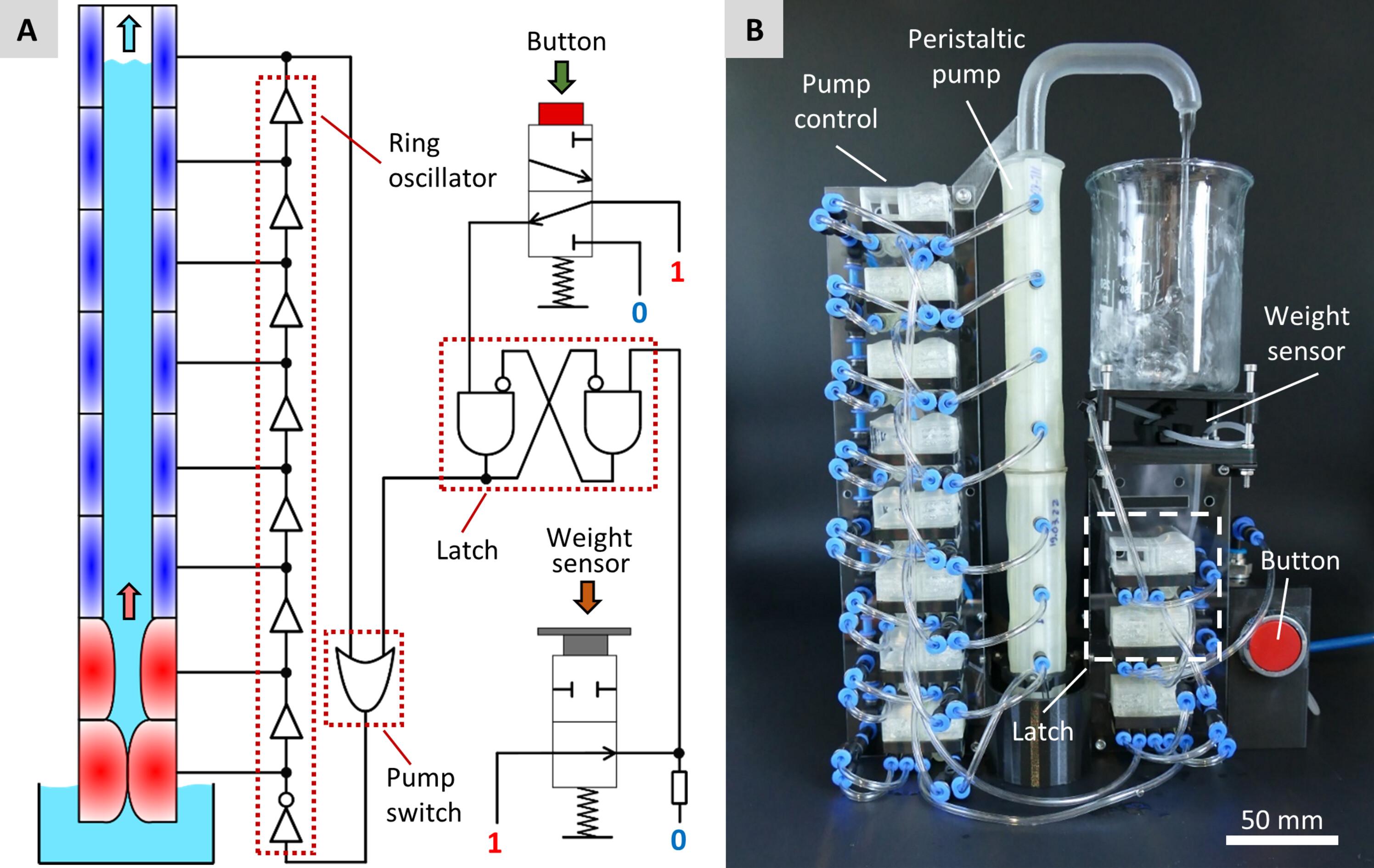
软体机器人正在逐步赶上金属机器的应用范围,并占据对传统机器而言具有挑战性的领域。气动执行器在这一发展过程中扮演着重要角色,可构建生物启发运动系统。气动逻辑门为控制通常由金属阀门和电路控制的压力激活型软机器人提供了一个强大的替代方案。现有的许多完全符合气动控制逻辑的方法都存在人工操作量大、压力耐受性低的问题。在我们的工作中,我们发明了可三维打印的气动逻辑门,它可以执行布尔运算并模仿电路。在 7 个小时内,一台长丝打印机就能打印出一个可用作 OR、AND 或 NOT 逻辑门的模块;逻辑功能由指定的输入信号定义。该闸门包含两个交替作用的气动阀门,其工作原理基于加压腔和内部 1 毫米长的 3D 打印管之间的相互作用。该闸门的设计无需为其中空部分提供任何支撑材料,因此打印后即可直接使用。根据所选材料的不同,模块可在 80 至 750 千帕斯卡的压力下工作。通过实施基于气动环振荡器和 1 位存储器的无电子饮料分配器,验证了所发明的门电路的能力。通过在由集成电路控制的完全灵活的 3D 打印机器人步行器上驾驶汽车,证明了它们的高合规性。
3D-printed digital pneumatic logic for the control of soft robotic actuators
Soft robots are paving their way to catch up with the application range of metal-based machines and to occupy fields that are challenging for traditional machines. Pneumatic actuators play an important role in this development, allowing the construction of bioinspired motion systems. Pneumatic logic gates provide a powerful alternative for controlling pressure-activated soft robots, which are often controlled by metallic valves and electric circuits. Many existing approaches for fully compliant pneumatic control logic suffer from high manual effort and low pressure tolerance. In our work, we invented three-dimensional (3D) printable, pneumatic logic gates that perform Boolean operations and imitate electric circuits. Within 7 hours, a filament printer is able to produce a module that serves as an OR, AND, or NOT gate; the logic function is defined by the assigned input signals. The gate contains two alternately acting pneumatic valves, whose work principle is based on the interaction of pressurized chambers and a 3D-printed 1-millimeter tube inside. The gate design does not require any kind of support material for its hollow parts, which makes the modules ready to use directly after printing. Depending on the chosen material, the modules can operate on a pressure supply between 80 and more than 750 kilopascals. The capabilities of the invented gates were verified by implementing an electronics-free drink dispenser based on a pneumatic ring oscillator and a 1-bit memory. Their high compliance is demonstrated by driving a car over a fully flexible, 3D-printed robotic walker controlled by an integrated circuit.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
