{"title":"利用速度障碍和 A* 算法进行海上自主水面舰艇防碰撞路径规划的方法","authors":"Donghun Yu , Myung-Il Roh","doi":"10.1016/j.ijnaoe.2024.100586","DOIUrl":null,"url":null,"abstract":"<div><p>With the increasing size of ships and increasing demand for autonomous navigation, ensuring ship safety is not the only concern; the efficiency of anti-collision technology should be enhanced. In this paper, we propose a novel hybrid anti-collision path planning method called VO-PATH. This method combines the advantages of the Velocity Obstacle (VO) algorithm, which guarantees anti-collision for autonomous ships, with the A* algorithm, which is known for its capacity to optimize paths. To assess the effectiveness of the proposed method, we conducted anti-collision simulations for both single- and multiple-encounter scenarios, all of which adhered to COLREGs-defined avoidance obligations. Furthermore, we evaluated the performance of the proposed method by comparing its results with those obtained using conventional VO and A* algorithms. The findings indicate that the proposed method is superior to the A* algorithm in terms of steering away from collisions in complex multiple-encounter scenarios. Additionally, the proposed method significantly reduces the distance traveled by the ship to avoid potential collisions, with improvements of up to approximately 6.6% compared with alternative algorithms. We expect that this reduction will enhance safety and provide a more efficient anti-collision path.</p></div>","PeriodicalId":14160,"journal":{"name":"International Journal of Naval Architecture and Ocean Engineering","volume":"16 ","pages":"Article 100586"},"PeriodicalIF":2.3000,"publicationDate":"2024-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2092678224000050/pdfft?md5=c4b71b1ddb3c2008785dc47e96c71e60&pid=1-s2.0-S2092678224000050-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Method for anti-collision path planning using velocity obstacle and A* algorithms for maritime autonomous surface ship\",\"authors\":\"Donghun Yu , Myung-Il Roh\",\"doi\":\"10.1016/j.ijnaoe.2024.100586\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>With the increasing size of ships and increasing demand for autonomous navigation, ensuring ship safety is not the only concern; the efficiency of anti-collision technology should be enhanced. In this paper, we propose a novel hybrid anti-collision path planning method called VO-PATH. This method combines the advantages of the Velocity Obstacle (VO) algorithm, which guarantees anti-collision for autonomous ships, with the A* algorithm, which is known for its capacity to optimize paths. To assess the effectiveness of the proposed method, we conducted anti-collision simulations for both single- and multiple-encounter scenarios, all of which adhered to COLREGs-defined avoidance obligations. Furthermore, we evaluated the performance of the proposed method by comparing its results with those obtained using conventional VO and A* algorithms. The findings indicate that the proposed method is superior to the A* algorithm in terms of steering away from collisions in complex multiple-encounter scenarios. Additionally, the proposed method significantly reduces the distance traveled by the ship to avoid potential collisions, with improvements of up to approximately 6.6% compared with alternative algorithms. We expect that this reduction will enhance safety and provide a more efficient anti-collision path.</p></div>\",\"PeriodicalId\":14160,\"journal\":{\"name\":\"International Journal of Naval Architecture and Ocean Engineering\",\"volume\":\"16 \",\"pages\":\"Article 100586\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2092678224000050/pdfft?md5=c4b71b1ddb3c2008785dc47e96c71e60&pid=1-s2.0-S2092678224000050-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Naval Architecture and Ocean Engineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2092678224000050\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, MARINE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Naval Architecture and Ocean Engineering","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2092678224000050","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, MARINE","Score":null,"Total":0}
Method for anti-collision path planning using velocity obstacle and A* algorithms for maritime autonomous surface ship
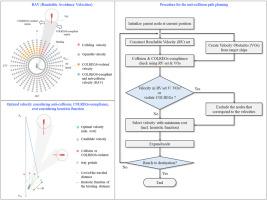
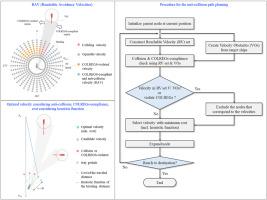
With the increasing size of ships and increasing demand for autonomous navigation, ensuring ship safety is not the only concern; the efficiency of anti-collision technology should be enhanced. In this paper, we propose a novel hybrid anti-collision path planning method called VO-PATH. This method combines the advantages of the Velocity Obstacle (VO) algorithm, which guarantees anti-collision for autonomous ships, with the A* algorithm, which is known for its capacity to optimize paths. To assess the effectiveness of the proposed method, we conducted anti-collision simulations for both single- and multiple-encounter scenarios, all of which adhered to COLREGs-defined avoidance obligations. Furthermore, we evaluated the performance of the proposed method by comparing its results with those obtained using conventional VO and A* algorithms. The findings indicate that the proposed method is superior to the A* algorithm in terms of steering away from collisions in complex multiple-encounter scenarios. Additionally, the proposed method significantly reduces the distance traveled by the ship to avoid potential collisions, with improvements of up to approximately 6.6% compared with alternative algorithms. We expect that this reduction will enhance safety and provide a more efficient anti-collision path.
期刊介绍:
International Journal of Naval Architecture and Ocean Engineering provides a forum for engineers and scientists from a wide range of disciplines to present and discuss various phenomena in the utilization and preservation of ocean environment. Without being limited by the traditional categorization, it is encouraged to present advanced technology development and scientific research, as long as they are aimed for more and better human engagement with ocean environment. Topics include, but not limited to: marine hydrodynamics; structural mechanics; marine propulsion system; design methodology & practice; production technology; system dynamics & control; marine equipment technology; materials science; underwater acoustics; ocean remote sensing; and information technology related to ship and marine systems; ocean energy systems; marine environmental engineering; maritime safety engineering; polar & arctic engineering; coastal & port engineering; subsea engineering; and specialized watercraft engineering.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
