{"title":"低可观测无人战斗飞行器的实时路线规划","authors":"Yuanchao Yang","doi":"10.1002/adc2.194","DOIUrl":null,"url":null,"abstract":"<p>The next generation of low observable (LO) unmanned combat aerial vehicle (UCAV) with highly autonomy to implement a penetration mission requires advanced methods for flyable and safe route planning (i.e., respecting physical capability of vehicle and threat coverage by hostile air defense radars) at a real-time manner. Currently, the main challenge of real-time route planning for LO UCAV is to achieve computationally efficiency under dynamic (pop-up/moving) threats by air defense radars. In this paper, a real-time planning paradigm in compliance with complex penetration requirements is proposed, and a complete modeling of route planning for LO UCAV's penetration as an optimal control problem is designed. The paper at first devises a direct method to transform the optimal control problem into a nonlinear programming (NLP) problem and then solves the formulated NLP problem under a moving planning horizon. The proposed method can give computationally efficient route planning results for LO UCAV's penetration under multiple kinds of radar threats. Numerical test results based on F-16 uninhabited platform demonstrate the effectiveness of the proposed method.</p>","PeriodicalId":100030,"journal":{"name":"Advanced Control for Applications","volume":"6 1","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2024-02-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adc2.194","citationCount":"0","resultStr":"{\"title\":\"Real-time route planning for low observable unmanned combat aerial vehicle\",\"authors\":\"Yuanchao Yang\",\"doi\":\"10.1002/adc2.194\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The next generation of low observable (LO) unmanned combat aerial vehicle (UCAV) with highly autonomy to implement a penetration mission requires advanced methods for flyable and safe route planning (i.e., respecting physical capability of vehicle and threat coverage by hostile air defense radars) at a real-time manner. Currently, the main challenge of real-time route planning for LO UCAV is to achieve computationally efficiency under dynamic (pop-up/moving) threats by air defense radars. In this paper, a real-time planning paradigm in compliance with complex penetration requirements is proposed, and a complete modeling of route planning for LO UCAV's penetration as an optimal control problem is designed. The paper at first devises a direct method to transform the optimal control problem into a nonlinear programming (NLP) problem and then solves the formulated NLP problem under a moving planning horizon. The proposed method can give computationally efficient route planning results for LO UCAV's penetration under multiple kinds of radar threats. Numerical test results based on F-16 uninhabited platform demonstrate the effectiveness of the proposed method.</p>\",\"PeriodicalId\":100030,\"journal\":{\"name\":\"Advanced Control for Applications\",\"volume\":\"6 1\",\"pages\":\"\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-02-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adc2.194\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Control for Applications\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/adc2.194\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Control for Applications","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adc2.194","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Real-time route planning for low observable unmanned combat aerial vehicle
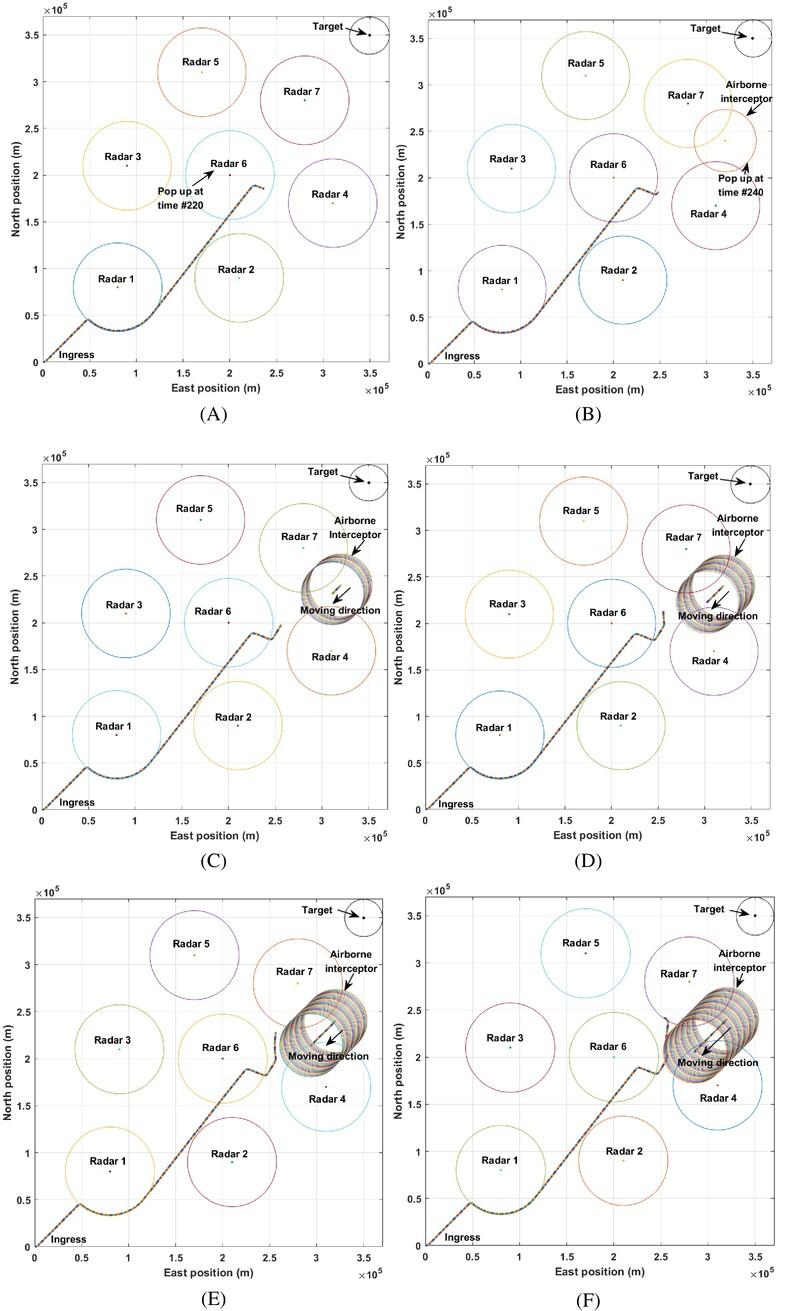
The next generation of low observable (LO) unmanned combat aerial vehicle (UCAV) with highly autonomy to implement a penetration mission requires advanced methods for flyable and safe route planning (i.e., respecting physical capability of vehicle and threat coverage by hostile air defense radars) at a real-time manner. Currently, the main challenge of real-time route planning for LO UCAV is to achieve computationally efficiency under dynamic (pop-up/moving) threats by air defense radars. In this paper, a real-time planning paradigm in compliance with complex penetration requirements is proposed, and a complete modeling of route planning for LO UCAV's penetration as an optimal control problem is designed. The paper at first devises a direct method to transform the optimal control problem into a nonlinear programming (NLP) problem and then solves the formulated NLP problem under a moving planning horizon. The proposed method can give computationally efficient route planning results for LO UCAV's penetration under multiple kinds of radar threats. Numerical test results based on F-16 uninhabited platform demonstrate the effectiveness of the proposed method.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
