I.C. Enochs , N. Soderberg , A.M. Palacio-Castro , K. Eaton
{"title":"用于高重复海洋实验的序贯处理应用机器人 (STAR)","authors":"I.C. Enochs , N. Soderberg , A.M. Palacio-Castro , K. Eaton","doi":"10.1016/j.ohx.2024.e00524","DOIUrl":null,"url":null,"abstract":"<div><p>Marine organisms are often subject to numerous anthropogenic stressors, resulting in widespread ecosystem degradation. Physiological responses to these stressors, however, are complicated by high biological variability, species-specific sensitivities, nonlinear relationships, and countless permutations of stressor combinations. Nevertheless, quantification of these relationships is paramount for parameterizing predictive tools and ultimately for effective management of marine resources. Multi-level, multi-stressor experimentation is therefore key, yet the high replication required has remained a logistical challenge and a financial barrier. To overcome these issues, we created an automated system for experimentation on marine organisms, the Sequential Treatment Application Robot (STAR). The system consists of a track-mounted robotic arm that sequentially applies precision treatments to independent aquaria via syringe and peristaltic pumps. The accuracy and precision were validated with dye and spectrophotometry, and stability was demonstrated by maintaining corals under treatment conditions for more than a month. The system is open source and scalable in that additional treatments and replicates may be added without incurring multiplicative costs. While STAR was designed for investigating the combined impacts of nutrients, warming, and disease on reef-building corals, it is highly customizable and may be used for experimentation involving a diverse array of treatments and species.</p></div>","PeriodicalId":37503,"journal":{"name":"HardwareX","volume":"18 ","pages":"Article e00524"},"PeriodicalIF":2.1000,"publicationDate":"2024-06-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S246806722400018X/pdfft?md5=b087de9fae5c627b7dea1da12245787e&pid=1-s2.0-S246806722400018X-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Sequential Treatment Application Robot (STAR) for high-replication marine experimentation\",\"authors\":\"I.C. Enochs , N. Soderberg , A.M. Palacio-Castro , K. Eaton\",\"doi\":\"10.1016/j.ohx.2024.e00524\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Marine organisms are often subject to numerous anthropogenic stressors, resulting in widespread ecosystem degradation. Physiological responses to these stressors, however, are complicated by high biological variability, species-specific sensitivities, nonlinear relationships, and countless permutations of stressor combinations. Nevertheless, quantification of these relationships is paramount for parameterizing predictive tools and ultimately for effective management of marine resources. Multi-level, multi-stressor experimentation is therefore key, yet the high replication required has remained a logistical challenge and a financial barrier. To overcome these issues, we created an automated system for experimentation on marine organisms, the Sequential Treatment Application Robot (STAR). The system consists of a track-mounted robotic arm that sequentially applies precision treatments to independent aquaria via syringe and peristaltic pumps. The accuracy and precision were validated with dye and spectrophotometry, and stability was demonstrated by maintaining corals under treatment conditions for more than a month. The system is open source and scalable in that additional treatments and replicates may be added without incurring multiplicative costs. While STAR was designed for investigating the combined impacts of nutrients, warming, and disease on reef-building corals, it is highly customizable and may be used for experimentation involving a diverse array of treatments and species.</p></div>\",\"PeriodicalId\":37503,\"journal\":{\"name\":\"HardwareX\",\"volume\":\"18 \",\"pages\":\"Article e00524\"},\"PeriodicalIF\":2.1000,\"publicationDate\":\"2024-06-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S246806722400018X/pdfft?md5=b087de9fae5c627b7dea1da12245787e&pid=1-s2.0-S246806722400018X-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"HardwareX\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S246806722400018X\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/3/28 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"HardwareX","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S246806722400018X","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/3/28 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
摘要
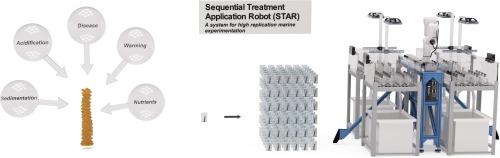
海洋生物经常受到众多人为压力因素的影响,导致生态系统普遍退化。然而,由于生物的高变异性、特定物种的敏感性、非线性关系以及无数种应激源组合,对这些应激源的生理反应非常复杂。然而,这些关系的量化对于预测工具的参数化以及最终对海洋资源的有效管理至关重要。因此,多层次、多胁迫实验是关键所在,但所需的高重复性仍然是一个后勤挑战和经济障碍。为了克服这些问题,我们创建了一个用于海洋生物实验的自动化系统--序贯处理应用机器人(STAR)。该系统由一个安装在轨道上的机械臂组成,通过注射器和蠕动泵依次对独立的水族箱进行精确处理。通过染料和分光光度法验证了其准确性和精确性,并通过将珊瑚在处理条件下维持一个多月证明了其稳定性。该系统开源且可扩展,可增加额外的处理和重复,而不会产生倍增成本。虽然 STAR 是为研究营养物质、气候变暖和疾病对造礁珊瑚的综合影响而设计的,但它具有很强的可定制性,可用于涉及各种处理方法和物种的实验。
Sequential Treatment Application Robot (STAR) for high-replication marine experimentation
Marine organisms are often subject to numerous anthropogenic stressors, resulting in widespread ecosystem degradation. Physiological responses to these stressors, however, are complicated by high biological variability, species-specific sensitivities, nonlinear relationships, and countless permutations of stressor combinations. Nevertheless, quantification of these relationships is paramount for parameterizing predictive tools and ultimately for effective management of marine resources. Multi-level, multi-stressor experimentation is therefore key, yet the high replication required has remained a logistical challenge and a financial barrier. To overcome these issues, we created an automated system for experimentation on marine organisms, the Sequential Treatment Application Robot (STAR). The system consists of a track-mounted robotic arm that sequentially applies precision treatments to independent aquaria via syringe and peristaltic pumps. The accuracy and precision were validated with dye and spectrophotometry, and stability was demonstrated by maintaining corals under treatment conditions for more than a month. The system is open source and scalable in that additional treatments and replicates may be added without incurring multiplicative costs. While STAR was designed for investigating the combined impacts of nutrients, warming, and disease on reef-building corals, it is highly customizable and may be used for experimentation involving a diverse array of treatments and species.
HardwareXEngineering-Industrial and Manufacturing Engineering
CiteScore
4.10
自引率
18.20%
发文量
124
审稿时长
24 weeks
期刊介绍:
HardwareX is an open access journal established to promote free and open source designing, building and customizing of scientific infrastructure (hardware). HardwareX aims to recognize researchers for the time and effort in developing scientific infrastructure while providing end-users with sufficient information to replicate and validate the advances presented. HardwareX is open to input from all scientific, technological and medical disciplines. Scientific infrastructure will be interpreted in the broadest sense. Including hardware modifications to existing infrastructure, sensors and tools that perform measurements and other functions outside of the traditional lab setting (such as wearables, air/water quality sensors, and low cost alternatives to existing tools), and the creation of wholly new tools for either standard or novel laboratory tasks. Authors are encouraged to submit hardware developments that address all aspects of science, not only the final measurement, for example, enhancements in sample preparation and handling, user safety, and quality control. The use of distributed digital manufacturing strategies (e.g. 3-D printing) is encouraged. All designs must be submitted under an open hardware license.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
