{"title":"EEBA:用于在 VR 中操作远处物体的高效且符合人体工学的大臂","authors":"Jian Wu , Lili Wang , Sio Kei Im , Chan Tong Lam","doi":"10.1016/j.ijhcs.2024.103273","DOIUrl":null,"url":null,"abstract":"<div><p>Object manipulation is the most common form of interaction in virtual reality. We introduced an efficient and ergonomic Big-Arm method to improve the efficiency and comfort of manipulating distant objects in virtual reality. We prolong the upper arm and forearm lengths according to the maximum distance of the manipulation space and construct the linear mapping between the real and virtual elbow angle, which makes manipulation easier to control and more efficient. We propose an optimized elbow angle mapping to further improve the efficiency and comfort of distant object manipulation. Two user studies were designed and conducted to evaluate the performance of our optimized Big-Arm method. The results show that our method achieves significant improvement in efficiency, ergonomic performance, and task load reduction for manipulating the distant object (distance <span><math><mo>≥</mo></math></span>6 m) compared to the state-of-the-art methods. At the same time, our method exhibits superior usability.</p></div>","PeriodicalId":54955,"journal":{"name":"International Journal of Human-Computer Studies","volume":"188 ","pages":"Article 103273"},"PeriodicalIF":5.1000,"publicationDate":"2024-08-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"EEBA: Efficient and ergonomic Big-Arm for distant object manipulation in VR\",\"authors\":\"Jian Wu , Lili Wang , Sio Kei Im , Chan Tong Lam\",\"doi\":\"10.1016/j.ijhcs.2024.103273\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Object manipulation is the most common form of interaction in virtual reality. We introduced an efficient and ergonomic Big-Arm method to improve the efficiency and comfort of manipulating distant objects in virtual reality. We prolong the upper arm and forearm lengths according to the maximum distance of the manipulation space and construct the linear mapping between the real and virtual elbow angle, which makes manipulation easier to control and more efficient. We propose an optimized elbow angle mapping to further improve the efficiency and comfort of distant object manipulation. Two user studies were designed and conducted to evaluate the performance of our optimized Big-Arm method. The results show that our method achieves significant improvement in efficiency, ergonomic performance, and task load reduction for manipulating the distant object (distance <span><math><mo>≥</mo></math></span>6 m) compared to the state-of-the-art methods. At the same time, our method exhibits superior usability.</p></div>\",\"PeriodicalId\":54955,\"journal\":{\"name\":\"International Journal of Human-Computer Studies\",\"volume\":\"188 \",\"pages\":\"Article 103273\"},\"PeriodicalIF\":5.1000,\"publicationDate\":\"2024-08-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Human-Computer Studies\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S1071581924000570\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/4/25 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, CYBERNETICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Human-Computer Studies","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S1071581924000570","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/4/25 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"COMPUTER SCIENCE, CYBERNETICS","Score":null,"Total":0}
EEBA: Efficient and ergonomic Big-Arm for distant object manipulation in VR
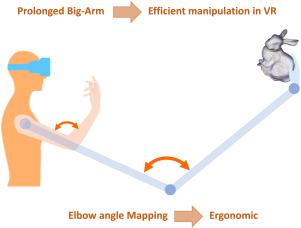
Object manipulation is the most common form of interaction in virtual reality. We introduced an efficient and ergonomic Big-Arm method to improve the efficiency and comfort of manipulating distant objects in virtual reality. We prolong the upper arm and forearm lengths according to the maximum distance of the manipulation space and construct the linear mapping between the real and virtual elbow angle, which makes manipulation easier to control and more efficient. We propose an optimized elbow angle mapping to further improve the efficiency and comfort of distant object manipulation. Two user studies were designed and conducted to evaluate the performance of our optimized Big-Arm method. The results show that our method achieves significant improvement in efficiency, ergonomic performance, and task load reduction for manipulating the distant object (distance 6 m) compared to the state-of-the-art methods. At the same time, our method exhibits superior usability.
期刊介绍:
The International Journal of Human-Computer Studies publishes original research over the whole spectrum of work relevant to the theory and practice of innovative interactive systems. The journal is inherently interdisciplinary, covering research in computing, artificial intelligence, psychology, linguistics, communication, design, engineering, and social organization, which is relevant to the design, analysis, evaluation and application of innovative interactive systems. Papers at the boundaries of these disciplines are especially welcome, as it is our view that interdisciplinary approaches are needed for producing theoretical insights in this complex area and for effective deployment of innovative technologies in concrete user communities.
Research areas relevant to the journal include, but are not limited to:
• Innovative interaction techniques
• Multimodal interaction
• Speech interaction
• Graphic interaction
• Natural language interaction
• Interaction in mobile and embedded systems
• Interface design and evaluation methodologies
• Design and evaluation of innovative interactive systems
• User interface prototyping and management systems
• Ubiquitous computing
• Wearable computers
• Pervasive computing
• Affective computing
• Empirical studies of user behaviour
• Empirical studies of programming and software engineering
• Computer supported cooperative work
• Computer mediated communication
• Virtual reality
• Mixed and augmented Reality
• Intelligent user interfaces
• Presence
...


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
