{"title":"无需预训练的人类步态类型识别:基于自适应模糊的运动辅助设备方法","authors":"Natee Chirachongcharoen, Sajid Nisar","doi":"10.1007/s10015-024-00950-x","DOIUrl":null,"url":null,"abstract":"<div><p>Gait-type recognition is important for robotic exoskeletons and walking-assistance devices to adjust their output according to the users’ needs. However, the growing trend of using machine learning (ML) models is both labor- and data-intensive, which makes it practically less attractive for application in exoskeletons and wearable-assistive devices. This research aims to devise a fuzzy-based gait recognition algorithm that requires minimum training data (only 40 cycles for each of the 5 gait types) and adapts to new users without having the need of pre-training for each of them. The proposed algorithm uses the fuzzy logic system (FLS) and Welford’s (variance computation) method to enhance the adaptability by adjusting the rules for gait-type recognition and fine-tuning them in real time for every new user without requiring a specific prior training. Simulation-based evaluation of the proposed algorithm shows a gait-type recognition accuracy of 63.0%, an improvement of 36.8% over the non-adaptive fuzzy-based recognition algorithm. Moreover, the results show that the proposed algorithm outperforms the popular ML methods (support vector machine, Naive Bayes classifier, and logistic regression) when subjected to limited gait-cycles data and no prior training is provided.</p></div>","PeriodicalId":46050,"journal":{"name":"Artificial Life and Robotics","volume":"29 3","pages":"389 - 397"},"PeriodicalIF":0.8000,"publicationDate":"2024-05-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Human gait-type recognition without pre-training: an adaptive fuzzy-based approach for locomotion-assistance devices\",\"authors\":\"Natee Chirachongcharoen, Sajid Nisar\",\"doi\":\"10.1007/s10015-024-00950-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Gait-type recognition is important for robotic exoskeletons and walking-assistance devices to adjust their output according to the users’ needs. However, the growing trend of using machine learning (ML) models is both labor- and data-intensive, which makes it practically less attractive for application in exoskeletons and wearable-assistive devices. This research aims to devise a fuzzy-based gait recognition algorithm that requires minimum training data (only 40 cycles for each of the 5 gait types) and adapts to new users without having the need of pre-training for each of them. The proposed algorithm uses the fuzzy logic system (FLS) and Welford’s (variance computation) method to enhance the adaptability by adjusting the rules for gait-type recognition and fine-tuning them in real time for every new user without requiring a specific prior training. Simulation-based evaluation of the proposed algorithm shows a gait-type recognition accuracy of 63.0%, an improvement of 36.8% over the non-adaptive fuzzy-based recognition algorithm. Moreover, the results show that the proposed algorithm outperforms the popular ML methods (support vector machine, Naive Bayes classifier, and logistic regression) when subjected to limited gait-cycles data and no prior training is provided.</p></div>\",\"PeriodicalId\":46050,\"journal\":{\"name\":\"Artificial Life and Robotics\",\"volume\":\"29 3\",\"pages\":\"389 - 397\"},\"PeriodicalIF\":0.8000,\"publicationDate\":\"2024-05-24\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Artificial Life and Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10015-024-00950-x\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Artificial Life and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1007/s10015-024-00950-x","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
摘要
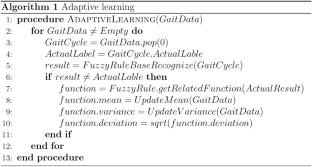
步态类型识别对于机器人外骨骼和步行辅助设备根据用户需求调整输出非常重要。然而,使用机器学习(ML)模型是一种日益增长的趋势,既耗费大量人力又耗费大量数据,这使得它在外骨骼和可穿戴辅助设备中的应用实际上并不那么有吸引力。本研究旨在设计一种基于模糊的步态识别算法,该算法只需最少的训练数据(5 种步态类型中每种只需 40 个循环),并能适应新用户,无需对每个用户进行预训练。所提出的算法使用模糊逻辑系统(FLS)和维尔福(方差计算)方法,通过调整步态类型识别规则来增强适应性,并针对每个新用户进行实时微调,而无需特定的预先训练。对拟议算法的仿真评估显示,步态类型识别准确率为 63.0%,比非自适应模糊识别算法提高了 36.8%。此外,结果表明,在有限的步态周期数据和不提供事先训练的情况下,所提出的算法优于流行的 ML 方法(支持向量机、Naive Bayes 分类器和逻辑回归)。
Human gait-type recognition without pre-training: an adaptive fuzzy-based approach for locomotion-assistance devices
Gait-type recognition is important for robotic exoskeletons and walking-assistance devices to adjust their output according to the users’ needs. However, the growing trend of using machine learning (ML) models is both labor- and data-intensive, which makes it practically less attractive for application in exoskeletons and wearable-assistive devices. This research aims to devise a fuzzy-based gait recognition algorithm that requires minimum training data (only 40 cycles for each of the 5 gait types) and adapts to new users without having the need of pre-training for each of them. The proposed algorithm uses the fuzzy logic system (FLS) and Welford’s (variance computation) method to enhance the adaptability by adjusting the rules for gait-type recognition and fine-tuning them in real time for every new user without requiring a specific prior training. Simulation-based evaluation of the proposed algorithm shows a gait-type recognition accuracy of 63.0%, an improvement of 36.8% over the non-adaptive fuzzy-based recognition algorithm. Moreover, the results show that the proposed algorithm outperforms the popular ML methods (support vector machine, Naive Bayes classifier, and logistic regression) when subjected to limited gait-cycles data and no prior training is provided.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
