Nadjib Dastagir, Doha Obed, Martynas Tamulevicius, Khaled Dastagir, Peter Maria Vogt
{"title":"在手部创伤急救护理中使用 Symani Surgical System®。","authors":"Nadjib Dastagir, Doha Obed, Martynas Tamulevicius, Khaled Dastagir, Peter Maria Vogt","doi":"10.1177/15533506241262568","DOIUrl":null,"url":null,"abstract":"<p><p><b>Background:</b> The use of robotic systems for microsurgery has gained popularity in recent years. Despite its drawbacks, such as increased learning time and lack of haptic feedback, robot-assisted microsurgery is beneficial for emergency care due to its reduced risk of tremor and fatigue. The Symani Surgical System® is 1 example of this advanced technology. The device offers a range of possibilities in the field of microsurgery by combining precision and dexterity, revolutionizing microsurgical procedures. This article explores the applications of the Symani in microsurgical procedures in emergency hand trauma care, highlighting its advantages and limitations. <b>Material and Methods:</b> We present the results of 62 anastomoses of blood vessels under .8 mm diameter after hand trauma. 31 anastomoses were conducted using the Symani Surgical System®, and the other 31 were done as a control group in hand-sewn technique. <b>Study Sample:</b> The patient characteristics, including sex, age, and risk factors, were matched. Results: We found no significant differences in the anastomosis surgery length when performed with the Symani (arterial 17.3 ± 1.9 min; venous 11.5 ± 1.3 min) vs the hand-sewn technique (arterial 16.1 ± 1.4 min; venous 10.2 ± 1.8 min). Additionally, the learning curve consistently decreased over time, with the 10th surgery taking 30% (arterial) less time. <b>Conclusion:</b> Our study indicates that robot-assisted microsurgery can help surgeons maintain a relaxed and focused state while producing results comparable to hand-sutured procedures in emergency care.</p>","PeriodicalId":22095,"journal":{"name":"Surgical Innovation","volume":" ","pages":"460-465"},"PeriodicalIF":1.6000,"publicationDate":"2024-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11408963/pdf/","citationCount":"0","resultStr":"{\"title\":\"The Use of the Symani Surgical System® in Emergency Hand Trauma Care.\",\"authors\":\"Nadjib Dastagir, Doha Obed, Martynas Tamulevicius, Khaled Dastagir, Peter Maria Vogt\",\"doi\":\"10.1177/15533506241262568\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p><b>Background:</b> The use of robotic systems for microsurgery has gained popularity in recent years. Despite its drawbacks, such as increased learning time and lack of haptic feedback, robot-assisted microsurgery is beneficial for emergency care due to its reduced risk of tremor and fatigue. The Symani Surgical System® is 1 example of this advanced technology. The device offers a range of possibilities in the field of microsurgery by combining precision and dexterity, revolutionizing microsurgical procedures. This article explores the applications of the Symani in microsurgical procedures in emergency hand trauma care, highlighting its advantages and limitations. <b>Material and Methods:</b> We present the results of 62 anastomoses of blood vessels under .8 mm diameter after hand trauma. 31 anastomoses were conducted using the Symani Surgical System®, and the other 31 were done as a control group in hand-sewn technique. <b>Study Sample:</b> The patient characteristics, including sex, age, and risk factors, were matched. Results: We found no significant differences in the anastomosis surgery length when performed with the Symani (arterial 17.3 ± 1.9 min; venous 11.5 ± 1.3 min) vs the hand-sewn technique (arterial 16.1 ± 1.4 min; venous 10.2 ± 1.8 min). Additionally, the learning curve consistently decreased over time, with the 10th surgery taking 30% (arterial) less time. <b>Conclusion:</b> Our study indicates that robot-assisted microsurgery can help surgeons maintain a relaxed and focused state while producing results comparable to hand-sutured procedures in emergency care.</p>\",\"PeriodicalId\":22095,\"journal\":{\"name\":\"Surgical Innovation\",\"volume\":\" \",\"pages\":\"460-465\"},\"PeriodicalIF\":1.6000,\"publicationDate\":\"2024-10-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11408963/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Surgical Innovation\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1177/15533506241262568\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/6/17 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q3\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Surgical Innovation","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1177/15533506241262568","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/6/17 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"SURGERY","Score":null,"Total":0}
The Use of the Symani Surgical System® in Emergency Hand Trauma Care.
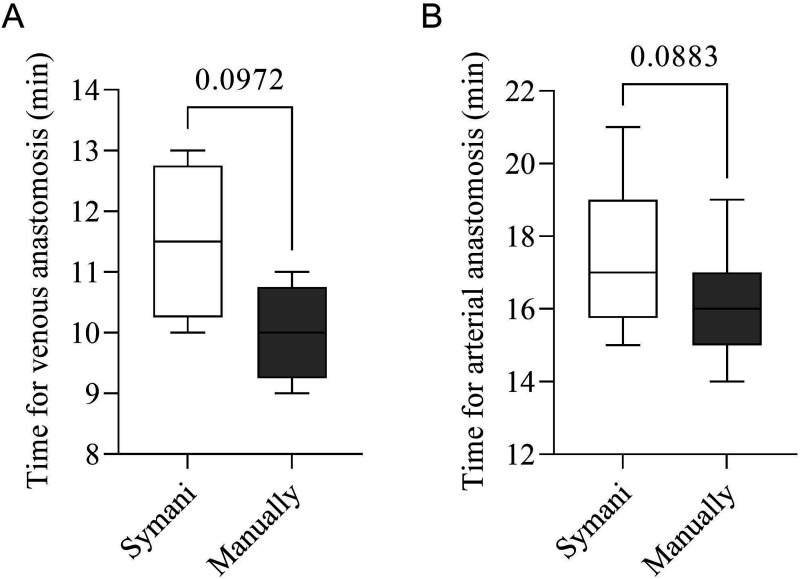
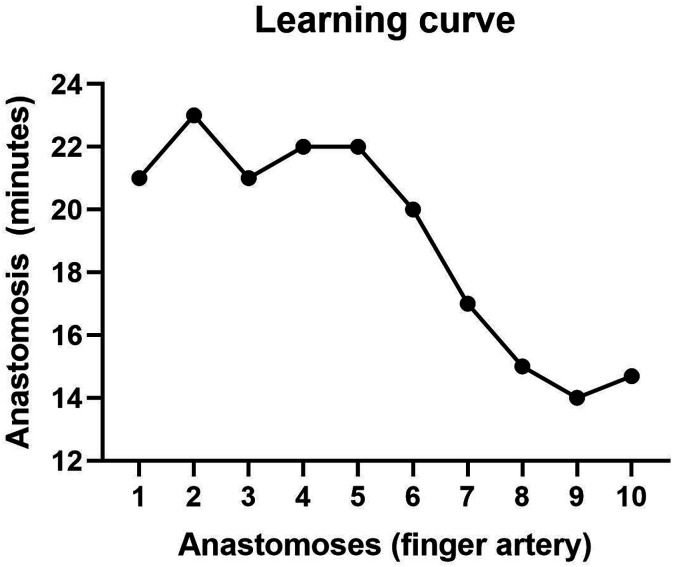
Background: The use of robotic systems for microsurgery has gained popularity in recent years. Despite its drawbacks, such as increased learning time and lack of haptic feedback, robot-assisted microsurgery is beneficial for emergency care due to its reduced risk of tremor and fatigue. The Symani Surgical System® is 1 example of this advanced technology. The device offers a range of possibilities in the field of microsurgery by combining precision and dexterity, revolutionizing microsurgical procedures. This article explores the applications of the Symani in microsurgical procedures in emergency hand trauma care, highlighting its advantages and limitations. Material and Methods: We present the results of 62 anastomoses of blood vessels under .8 mm diameter after hand trauma. 31 anastomoses were conducted using the Symani Surgical System®, and the other 31 were done as a control group in hand-sewn technique. Study Sample: The patient characteristics, including sex, age, and risk factors, were matched. Results: We found no significant differences in the anastomosis surgery length when performed with the Symani (arterial 17.3 ± 1.9 min; venous 11.5 ± 1.3 min) vs the hand-sewn technique (arterial 16.1 ± 1.4 min; venous 10.2 ± 1.8 min). Additionally, the learning curve consistently decreased over time, with the 10th surgery taking 30% (arterial) less time. Conclusion: Our study indicates that robot-assisted microsurgery can help surgeons maintain a relaxed and focused state while producing results comparable to hand-sutured procedures in emergency care.
期刊介绍:
Surgical Innovation (SRI) is a peer-reviewed bi-monthly journal focusing on minimally invasive surgical techniques, new instruments such as laparoscopes and endoscopes, and new technologies. SRI prepares surgeons to think and work in "the operating room of the future" through learning new techniques, understanding and adapting to new technologies, maintaining surgical competencies, and applying surgical outcomes data to their practices. This journal is a member of the Committee on Publication Ethics (COPE).




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
