Zonghe Xu, Lin Zhou, Bin Han, Shuang Wu, Yanjun Xiao, Sihui Zhang, Jiang Chen, Jianbin Guo, Dong Wu
{"title":"使用不同动态导航和机器人系统植入牙科植入物的准确性:一项体外研究。","authors":"Zonghe Xu, Lin Zhou, Bin Han, Shuang Wu, Yanjun Xiao, Sihui Zhang, Jiang Chen, Jianbin Guo, Dong Wu","doi":"10.1038/s41746-024-01178-6","DOIUrl":null,"url":null,"abstract":"Computer-aided implant surgery has undergone continuous development in recent years. In this study, active and passive systems of dynamic navigation were divided into active dynamic navigation system group and passive dynamic navigation system group (ADG and PDG), respectively. Active, passive and semi-active implant robots were divided into active robot group, passive robot group and semi-active robot group (ARG, PRG and SRG), respectively. Each group placed two implants (FDI tooth positions 31 and 36) in a model 12 times. The accuracy of 216 implants in 108 models were analysed. The coronal deviations of ADG, PDG, ARG, PRG and SRG were 0.85 ± 0.17 mm, 1.05 ± 0.42 mm, 0.29 ± 0.15 mm, 0.40 ± 0.16 mm and 0.33 ± 0.14 mm, respectively. The apical deviations of the five groups were 1.11 ± 0.23 mm, 1.07 ± 0.38 mm, 0.29 ± 0.15 mm, 0.50 ± 0.19 mm and 0.36 ± 0.16 mm, respectively. The axial deviations of the five groups were 1.78 ± 0.73°, 1.99 ± 1.20°, 0.61 ± 0.25°, 1.04 ± 0.37° and 0.42 ± 0.18°, respectively. The coronal, apical and axial deviations of ADG were higher than those of ARG, PRG and SRG (all P < 0.001). Similarly, the coronal, apical and axial deviations of PDG were higher than those of ARG, PRG, and SRG (all P < 0.001). Dynamic and robotic computer-aided implant surgery may show good implant accuracy in vitro. However, the accuracy and stability of implant robots are higher than those of dynamic navigation systems.","PeriodicalId":19349,"journal":{"name":"NPJ Digital Medicine","volume":" ","pages":"1-9"},"PeriodicalIF":15.1000,"publicationDate":"2024-07-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11227595/pdf/","citationCount":"0","resultStr":"{\"title\":\"Accuracy of dental implant placement using different dynamic navigation and robotic systems: an in vitro study\",\"authors\":\"Zonghe Xu, Lin Zhou, Bin Han, Shuang Wu, Yanjun Xiao, Sihui Zhang, Jiang Chen, Jianbin Guo, Dong Wu\",\"doi\":\"10.1038/s41746-024-01178-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Computer-aided implant surgery has undergone continuous development in recent years. In this study, active and passive systems of dynamic navigation were divided into active dynamic navigation system group and passive dynamic navigation system group (ADG and PDG), respectively. Active, passive and semi-active implant robots were divided into active robot group, passive robot group and semi-active robot group (ARG, PRG and SRG), respectively. Each group placed two implants (FDI tooth positions 31 and 36) in a model 12 times. The accuracy of 216 implants in 108 models were analysed. The coronal deviations of ADG, PDG, ARG, PRG and SRG were 0.85 ± 0.17 mm, 1.05 ± 0.42 mm, 0.29 ± 0.15 mm, 0.40 ± 0.16 mm and 0.33 ± 0.14 mm, respectively. The apical deviations of the five groups were 1.11 ± 0.23 mm, 1.07 ± 0.38 mm, 0.29 ± 0.15 mm, 0.50 ± 0.19 mm and 0.36 ± 0.16 mm, respectively. The axial deviations of the five groups were 1.78 ± 0.73°, 1.99 ± 1.20°, 0.61 ± 0.25°, 1.04 ± 0.37° and 0.42 ± 0.18°, respectively. The coronal, apical and axial deviations of ADG were higher than those of ARG, PRG and SRG (all P < 0.001). Similarly, the coronal, apical and axial deviations of PDG were higher than those of ARG, PRG, and SRG (all P < 0.001). Dynamic and robotic computer-aided implant surgery may show good implant accuracy in vitro. However, the accuracy and stability of implant robots are higher than those of dynamic navigation systems.\",\"PeriodicalId\":19349,\"journal\":{\"name\":\"NPJ Digital Medicine\",\"volume\":\" \",\"pages\":\"1-9\"},\"PeriodicalIF\":15.1000,\"publicationDate\":\"2024-07-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11227595/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"NPJ Digital Medicine\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://www.nature.com/articles/s41746-024-01178-6\",\"RegionNum\":1,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"HEALTH CARE SCIENCES & SERVICES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"NPJ Digital Medicine","FirstCategoryId":"3","ListUrlMain":"https://www.nature.com/articles/s41746-024-01178-6","RegionNum":1,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"HEALTH CARE SCIENCES & SERVICES","Score":null,"Total":0}
Accuracy of dental implant placement using different dynamic navigation and robotic systems: an in vitro study
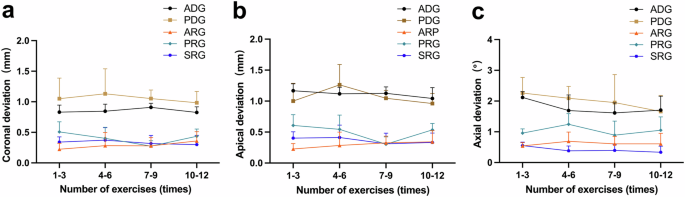
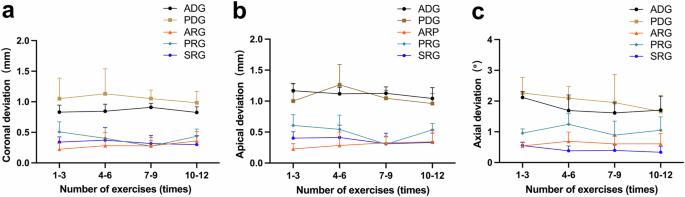
Computer-aided implant surgery has undergone continuous development in recent years. In this study, active and passive systems of dynamic navigation were divided into active dynamic navigation system group and passive dynamic navigation system group (ADG and PDG), respectively. Active, passive and semi-active implant robots were divided into active robot group, passive robot group and semi-active robot group (ARG, PRG and SRG), respectively. Each group placed two implants (FDI tooth positions 31 and 36) in a model 12 times. The accuracy of 216 implants in 108 models were analysed. The coronal deviations of ADG, PDG, ARG, PRG and SRG were 0.85 ± 0.17 mm, 1.05 ± 0.42 mm, 0.29 ± 0.15 mm, 0.40 ± 0.16 mm and 0.33 ± 0.14 mm, respectively. The apical deviations of the five groups were 1.11 ± 0.23 mm, 1.07 ± 0.38 mm, 0.29 ± 0.15 mm, 0.50 ± 0.19 mm and 0.36 ± 0.16 mm, respectively. The axial deviations of the five groups were 1.78 ± 0.73°, 1.99 ± 1.20°, 0.61 ± 0.25°, 1.04 ± 0.37° and 0.42 ± 0.18°, respectively. The coronal, apical and axial deviations of ADG were higher than those of ARG, PRG and SRG (all P < 0.001). Similarly, the coronal, apical and axial deviations of PDG were higher than those of ARG, PRG, and SRG (all P < 0.001). Dynamic and robotic computer-aided implant surgery may show good implant accuracy in vitro. However, the accuracy and stability of implant robots are higher than those of dynamic navigation systems.
期刊介绍:
npj Digital Medicine is an online open-access journal that focuses on publishing peer-reviewed research in the field of digital medicine. The journal covers various aspects of digital medicine, including the application and implementation of digital and mobile technologies in clinical settings, virtual healthcare, and the use of artificial intelligence and informatics.
The primary goal of the journal is to support innovation and the advancement of healthcare through the integration of new digital and mobile technologies. When determining if a manuscript is suitable for publication, the journal considers four important criteria: novelty, clinical relevance, scientific rigor, and digital innovation.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
