Tom van Dijk, Christophe De Wagter, Guido C. H. E. de Croon
{"title":"微型自主机器人的视觉路线跟踪","authors":"Tom van Dijk, Christophe De Wagter, Guido C. H. E. de Croon","doi":"10.1126/scirobotics.adk0310","DOIUrl":null,"url":null,"abstract":"<div >Navigation is an essential capability for autonomous robots. In particular, visual navigation has been a major research topic in robotics because cameras are lightweight, power-efficient sensors that provide rich information on the environment. However, the main challenge of visual navigation is that it requires substantial computational power and memory for visual processing and storage of the results. As of yet, this has precluded its use on small, extremely resource-constrained robots such as lightweight drones. Inspired by the parsimony of natural intelligence, we propose an insect-inspired approach toward visual navigation that is specifically aimed at extremely resource-restricted robots. It is a route-following approach in which a robot’s outbound trajectory is stored as a collection of highly compressed panoramic images together with their spatial relationships as measured with odometry. During the inbound journey, the robot uses a combination of odometry and visual homing to return to the stored locations, with visual homing preventing the buildup of odometric drift. A main advancement of the proposed strategy is that the number of stored compressed images is minimized by spacing them apart as far as the accuracy of odometry allows. To demonstrate the suitability for small systems, we implemented the strategy on a tiny 56-gram drone. The drone could successfully follow routes up to 100 meters with a trajectory representation that consumed less than 20 bytes per meter. The presented method forms a substantial step toward the autonomous visual navigation of tiny robots, facilitating their more widespread application.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 92","pages":""},"PeriodicalIF":27.5000,"publicationDate":"2024-07-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adk0310","citationCount":"0","resultStr":"{\"title\":\"Visual route following for tiny autonomous robots\",\"authors\":\"Tom van Dijk, Christophe De Wagter, Guido C. H. E. de Croon\",\"doi\":\"10.1126/scirobotics.adk0310\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div >Navigation is an essential capability for autonomous robots. In particular, visual navigation has been a major research topic in robotics because cameras are lightweight, power-efficient sensors that provide rich information on the environment. However, the main challenge of visual navigation is that it requires substantial computational power and memory for visual processing and storage of the results. As of yet, this has precluded its use on small, extremely resource-constrained robots such as lightweight drones. Inspired by the parsimony of natural intelligence, we propose an insect-inspired approach toward visual navigation that is specifically aimed at extremely resource-restricted robots. It is a route-following approach in which a robot’s outbound trajectory is stored as a collection of highly compressed panoramic images together with their spatial relationships as measured with odometry. During the inbound journey, the robot uses a combination of odometry and visual homing to return to the stored locations, with visual homing preventing the buildup of odometric drift. A main advancement of the proposed strategy is that the number of stored compressed images is minimized by spacing them apart as far as the accuracy of odometry allows. To demonstrate the suitability for small systems, we implemented the strategy on a tiny 56-gram drone. The drone could successfully follow routes up to 100 meters with a trajectory representation that consumed less than 20 bytes per meter. The presented method forms a substantial step toward the autonomous visual navigation of tiny robots, facilitating their more widespread application.</div>\",\"PeriodicalId\":56029,\"journal\":{\"name\":\"Science Robotics\",\"volume\":\"9 92\",\"pages\":\"\"},\"PeriodicalIF\":27.5000,\"publicationDate\":\"2024-07-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.science.org/doi/reader/10.1126/scirobotics.adk0310\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Science Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.science.org/doi/10.1126/scirobotics.adk0310\",\"RegionNum\":1,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adk0310","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
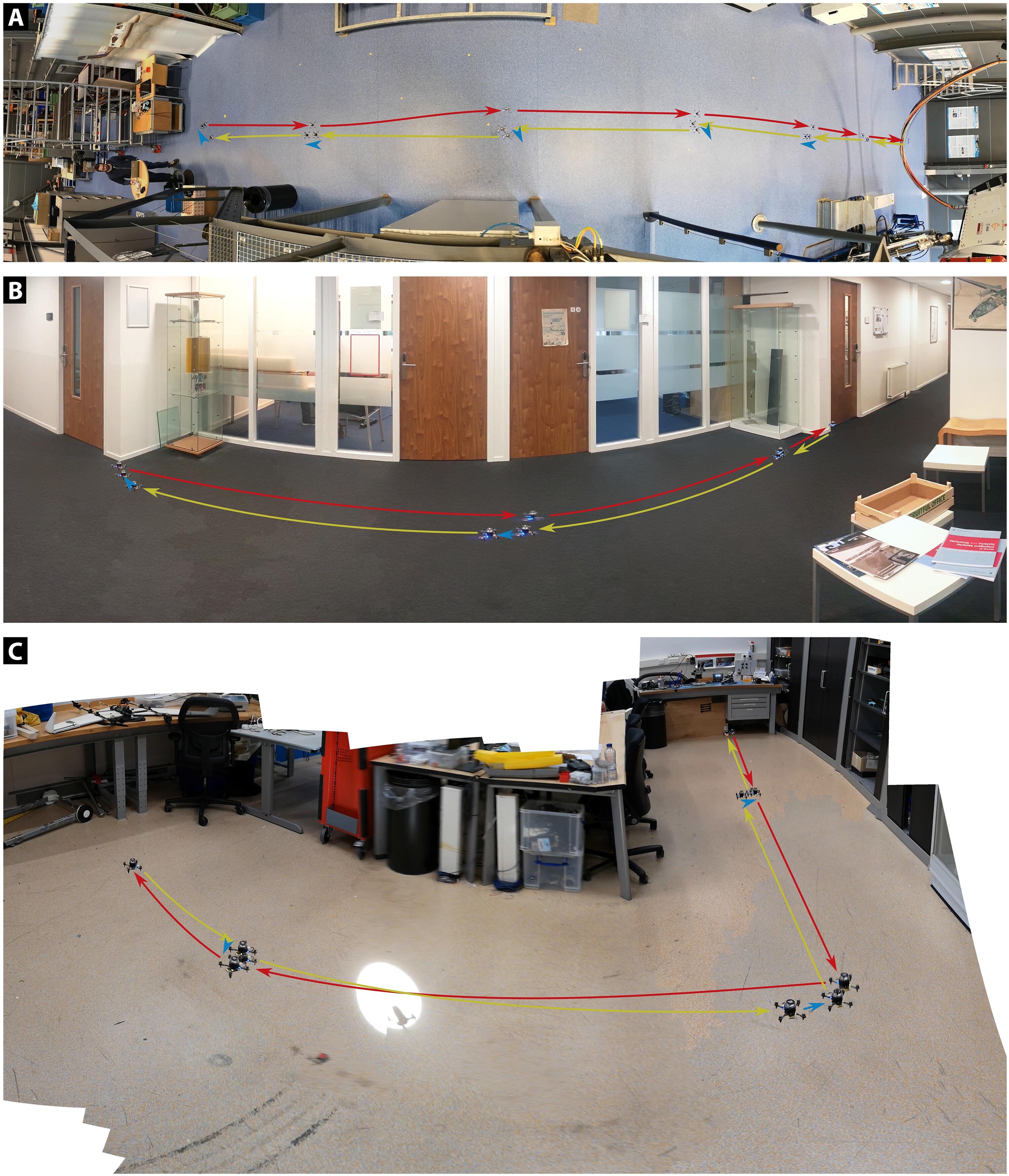
Navigation is an essential capability for autonomous robots. In particular, visual navigation has been a major research topic in robotics because cameras are lightweight, power-efficient sensors that provide rich information on the environment. However, the main challenge of visual navigation is that it requires substantial computational power and memory for visual processing and storage of the results. As of yet, this has precluded its use on small, extremely resource-constrained robots such as lightweight drones. Inspired by the parsimony of natural intelligence, we propose an insect-inspired approach toward visual navigation that is specifically aimed at extremely resource-restricted robots. It is a route-following approach in which a robot’s outbound trajectory is stored as a collection of highly compressed panoramic images together with their spatial relationships as measured with odometry. During the inbound journey, the robot uses a combination of odometry and visual homing to return to the stored locations, with visual homing preventing the buildup of odometric drift. A main advancement of the proposed strategy is that the number of stored compressed images is minimized by spacing them apart as far as the accuracy of odometry allows. To demonstrate the suitability for small systems, we implemented the strategy on a tiny 56-gram drone. The drone could successfully follow routes up to 100 meters with a trajectory representation that consumed less than 20 bytes per meter. The presented method forms a substantial step toward the autonomous visual navigation of tiny robots, facilitating their more widespread application.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
