Peidong Zhang , Tong Zhou , Kuan Zhang , Yifei Luo , Yang Li
{"title":"基于双稳态元件组件和双兼容桁架连接的高刚度可重构表面","authors":"Peidong Zhang , Tong Zhou , Kuan Zhang , Yifei Luo , Yang Li","doi":"10.1016/j.eml.2024.102187","DOIUrl":null,"url":null,"abstract":"<div><p>Reconfigurable surfaces contribute to multi-task robotic platforms, such as reconfigurable phased array antennas with variable aperture, by morphing between multiple specified shapes. Controlling each tile to approximate the variating shape of target surfaces requires a large number of accurate actuators. Previous research has demonstrated employing bistable-element-assembly to form reconfigurable surfaces for significant actuation simplification but suffering from low out-of-plane stiffness resulting in the lack of load-bearing capacity for carrying functional units with good mechanical accuracy. This paper proposes a design framework for tile-assembling bistable (TAB) surfaces with bi-compatible truss attachment for two prescribable stable configurations. The bistability comes from joining surface tiles with bistable elements, which contributes to easy actuation with fewer inaccurate actuators. Bi-compatible truss structures, which are only kinematically compatible at the two prescribed states, are introduced to enhance the out-of-plane stiffness of the TAB surface and improve its load-bearing capacity. Additionally and consequently, the kinematic determinacy of the reconfigurable surfaces is increased by the truss introduction, where bistable elements control the metric while truss structures dictate the principal curvature of the surface. This diminishes the redundant degrees of freedom with enhanced shape-approximation and reconfiguration-coordination. Four prototypes are designed and manufactured, which are a three-tile by three-tile (3 × 3) TAB surface that is stable at flat and spherical configurations, a 5 × 5 TAB surface with flat and spherical stable configurations, a 3 × 3 TAB surface that is stable at the flat and saddle configurations, and a 3 × 3 TAB surface that is stable at the sphere and saddle shapes. The out-of-plane stiffness, easiness of actuation, and shape accuracy of all prototypes are evaluated and show promises for real engineering applications.</p></div>","PeriodicalId":56247,"journal":{"name":"Extreme Mechanics Letters","volume":"71 ","pages":"Article 102187"},"PeriodicalIF":4.5000,"publicationDate":"2024-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"High-stiffness reconfigurable surfaces based on bistable element assembly and bi-compatible truss attachment\",\"authors\":\"Peidong Zhang , Tong Zhou , Kuan Zhang , Yifei Luo , Yang Li\",\"doi\":\"10.1016/j.eml.2024.102187\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Reconfigurable surfaces contribute to multi-task robotic platforms, such as reconfigurable phased array antennas with variable aperture, by morphing between multiple specified shapes. Controlling each tile to approximate the variating shape of target surfaces requires a large number of accurate actuators. Previous research has demonstrated employing bistable-element-assembly to form reconfigurable surfaces for significant actuation simplification but suffering from low out-of-plane stiffness resulting in the lack of load-bearing capacity for carrying functional units with good mechanical accuracy. This paper proposes a design framework for tile-assembling bistable (TAB) surfaces with bi-compatible truss attachment for two prescribable stable configurations. The bistability comes from joining surface tiles with bistable elements, which contributes to easy actuation with fewer inaccurate actuators. Bi-compatible truss structures, which are only kinematically compatible at the two prescribed states, are introduced to enhance the out-of-plane stiffness of the TAB surface and improve its load-bearing capacity. Additionally and consequently, the kinematic determinacy of the reconfigurable surfaces is increased by the truss introduction, where bistable elements control the metric while truss structures dictate the principal curvature of the surface. This diminishes the redundant degrees of freedom with enhanced shape-approximation and reconfiguration-coordination. Four prototypes are designed and manufactured, which are a three-tile by three-tile (3 × 3) TAB surface that is stable at flat and spherical configurations, a 5 × 5 TAB surface with flat and spherical stable configurations, a 3 × 3 TAB surface that is stable at the flat and saddle configurations, and a 3 × 3 TAB surface that is stable at the sphere and saddle shapes. The out-of-plane stiffness, easiness of actuation, and shape accuracy of all prototypes are evaluated and show promises for real engineering applications.</p></div>\",\"PeriodicalId\":56247,\"journal\":{\"name\":\"Extreme Mechanics Letters\",\"volume\":\"71 \",\"pages\":\"Article 102187\"},\"PeriodicalIF\":4.5000,\"publicationDate\":\"2024-09-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Extreme Mechanics Letters\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2352431624000671\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/7/6 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"MATERIALS SCIENCE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Extreme Mechanics Letters","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2352431624000671","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/7/6 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
High-stiffness reconfigurable surfaces based on bistable element assembly and bi-compatible truss attachment
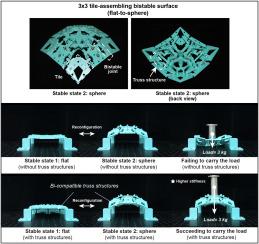
Reconfigurable surfaces contribute to multi-task robotic platforms, such as reconfigurable phased array antennas with variable aperture, by morphing between multiple specified shapes. Controlling each tile to approximate the variating shape of target surfaces requires a large number of accurate actuators. Previous research has demonstrated employing bistable-element-assembly to form reconfigurable surfaces for significant actuation simplification but suffering from low out-of-plane stiffness resulting in the lack of load-bearing capacity for carrying functional units with good mechanical accuracy. This paper proposes a design framework for tile-assembling bistable (TAB) surfaces with bi-compatible truss attachment for two prescribable stable configurations. The bistability comes from joining surface tiles with bistable elements, which contributes to easy actuation with fewer inaccurate actuators. Bi-compatible truss structures, which are only kinematically compatible at the two prescribed states, are introduced to enhance the out-of-plane stiffness of the TAB surface and improve its load-bearing capacity. Additionally and consequently, the kinematic determinacy of the reconfigurable surfaces is increased by the truss introduction, where bistable elements control the metric while truss structures dictate the principal curvature of the surface. This diminishes the redundant degrees of freedom with enhanced shape-approximation and reconfiguration-coordination. Four prototypes are designed and manufactured, which are a three-tile by three-tile (3 × 3) TAB surface that is stable at flat and spherical configurations, a 5 × 5 TAB surface with flat and spherical stable configurations, a 3 × 3 TAB surface that is stable at the flat and saddle configurations, and a 3 × 3 TAB surface that is stable at the sphere and saddle shapes. The out-of-plane stiffness, easiness of actuation, and shape accuracy of all prototypes are evaluated and show promises for real engineering applications.
期刊介绍:
Extreme Mechanics Letters (EML) enables rapid communication of research that highlights the role of mechanics in multi-disciplinary areas across materials science, physics, chemistry, biology, medicine and engineering. Emphasis is on the impact, depth and originality of new concepts, methods and observations at the forefront of applied sciences.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
