{"title":"多模态软阀门可提高物理响应能力,实现软机器人的抢先恢复能力","authors":"Marco Pontin, Dana D. Damian","doi":"10.1126/scirobotics.adk9978","DOIUrl":null,"url":null,"abstract":"<div >Resilience is crucial for the self-preservation of biological systems: Humans recover from wounds thanks to an immune system that autonomously enacts a multistage response to promote healing. Similar passive mechanisms can enable pneumatic soft robots to overcome common faults such as bursts originating from punctures or overpressurization. Recent technological advancements, ranging from fault-tolerant controllers for robot reconfigurability to self-healing materials, have paved the way for robot resilience. However, these techniques require powerful processors and large datasets or external hardware. How to extend the operational life span of damaged soft robots with minimal computational and physical resources remains unclear. In this study, we demonstrated a multimodal pneumatic soft valve capable of passive resilient reactions, triggered by faults, to prevent or isolate damage in soft robots. In its forward operation mode, the valve, requiring a single supply pressure, isolated punctured soft inflatable elements from the rest of the soft robot in as fast as 21 milliseconds. In its reverse operation mode, the valve can passively protect robots against overpressurization caused by external disturbances, avoiding plastic deformations and bursts. Furthermore, the two modes combined enabled the creation of an endogenously controlled valve capable of autonomous burst isolation. We demonstrated the passive and quick response and the possibility of monolithic integration of the soft valve in grippers and crawling robots. The approach proposed in this study provides a distributed small-footprint alternative to controller-based resilience and is expected to help soft robots achieve uninterrupted long-lasting operation.</div>","PeriodicalId":56029,"journal":{"name":"Science Robotics","volume":"9 92","pages":""},"PeriodicalIF":25.5000,"publicationDate":"2024-07-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.science.org/doi/reader/10.1126/scirobotics.adk9978","citationCount":"0","resultStr":"{\"title\":\"Multimodal soft valve enables physical responsiveness for preemptive resilience of soft robots\",\"authors\":\"Marco Pontin, Dana D. Damian\",\"doi\":\"10.1126/scirobotics.adk9978\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div >Resilience is crucial for the self-preservation of biological systems: Humans recover from wounds thanks to an immune system that autonomously enacts a multistage response to promote healing. Similar passive mechanisms can enable pneumatic soft robots to overcome common faults such as bursts originating from punctures or overpressurization. Recent technological advancements, ranging from fault-tolerant controllers for robot reconfigurability to self-healing materials, have paved the way for robot resilience. However, these techniques require powerful processors and large datasets or external hardware. How to extend the operational life span of damaged soft robots with minimal computational and physical resources remains unclear. In this study, we demonstrated a multimodal pneumatic soft valve capable of passive resilient reactions, triggered by faults, to prevent or isolate damage in soft robots. In its forward operation mode, the valve, requiring a single supply pressure, isolated punctured soft inflatable elements from the rest of the soft robot in as fast as 21 milliseconds. In its reverse operation mode, the valve can passively protect robots against overpressurization caused by external disturbances, avoiding plastic deformations and bursts. Furthermore, the two modes combined enabled the creation of an endogenously controlled valve capable of autonomous burst isolation. We demonstrated the passive and quick response and the possibility of monolithic integration of the soft valve in grippers and crawling robots. The approach proposed in this study provides a distributed small-footprint alternative to controller-based resilience and is expected to help soft robots achieve uninterrupted long-lasting operation.</div>\",\"PeriodicalId\":56029,\"journal\":{\"name\":\"Science Robotics\",\"volume\":\"9 92\",\"pages\":\"\"},\"PeriodicalIF\":25.5000,\"publicationDate\":\"2024-07-24\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.science.org/doi/reader/10.1126/scirobotics.adk9978\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Science Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.science.org/doi/10.1126/scirobotics.adk9978\",\"RegionNum\":1,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science Robotics","FirstCategoryId":"94","ListUrlMain":"https://www.science.org/doi/10.1126/scirobotics.adk9978","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
Multimodal soft valve enables physical responsiveness for preemptive resilience of soft robots
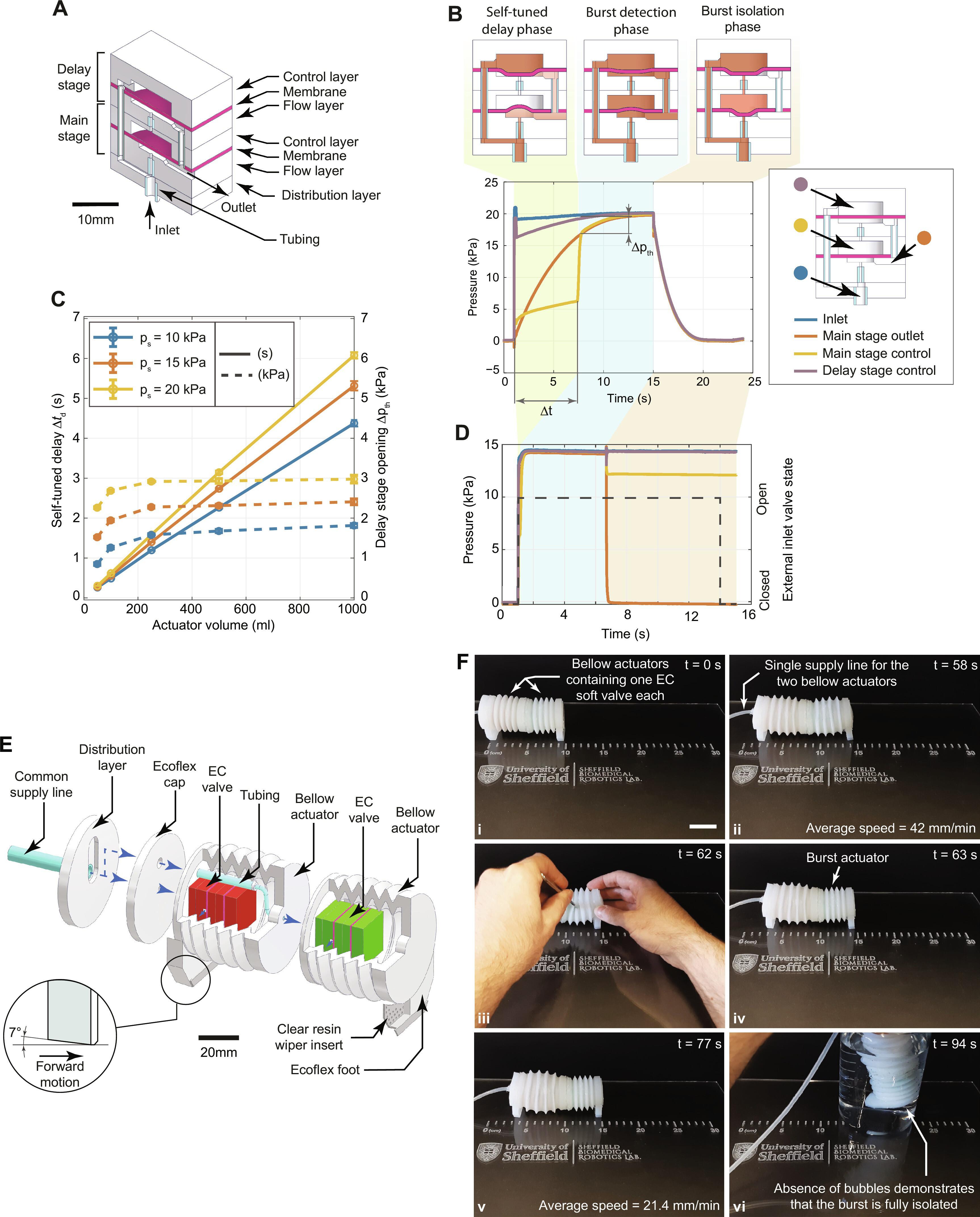
Resilience is crucial for the self-preservation of biological systems: Humans recover from wounds thanks to an immune system that autonomously enacts a multistage response to promote healing. Similar passive mechanisms can enable pneumatic soft robots to overcome common faults such as bursts originating from punctures or overpressurization. Recent technological advancements, ranging from fault-tolerant controllers for robot reconfigurability to self-healing materials, have paved the way for robot resilience. However, these techniques require powerful processors and large datasets or external hardware. How to extend the operational life span of damaged soft robots with minimal computational and physical resources remains unclear. In this study, we demonstrated a multimodal pneumatic soft valve capable of passive resilient reactions, triggered by faults, to prevent or isolate damage in soft robots. In its forward operation mode, the valve, requiring a single supply pressure, isolated punctured soft inflatable elements from the rest of the soft robot in as fast as 21 milliseconds. In its reverse operation mode, the valve can passively protect robots against overpressurization caused by external disturbances, avoiding plastic deformations and bursts. Furthermore, the two modes combined enabled the creation of an endogenously controlled valve capable of autonomous burst isolation. We demonstrated the passive and quick response and the possibility of monolithic integration of the soft valve in grippers and crawling robots. The approach proposed in this study provides a distributed small-footprint alternative to controller-based resilience and is expected to help soft robots achieve uninterrupted long-lasting operation.
期刊介绍:
Science Robotics publishes original, peer-reviewed, science- or engineering-based research articles that advance the field of robotics. The journal also features editor-commissioned Reviews. An international team of academic editors holds Science Robotics articles to the same high-quality standard that is the hallmark of the Science family of journals.
Sub-topics include: actuators, advanced materials, artificial Intelligence, autonomous vehicles, bio-inspired design, exoskeletons, fabrication, field robotics, human-robot interaction, humanoids, industrial robotics, kinematics, machine learning, material science, medical technology, motion planning and control, micro- and nano-robotics, multi-robot control, sensors, service robotics, social and ethical issues, soft robotics, and space, planetary and undersea exploration.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
