Du Xu , Haijie Mo , Jian Yi , Long Huang , Lairong Yin
{"title":"用于装配和磨削应用的具有可变刚度手腕的混合顺应式控制器","authors":"Du Xu , Haijie Mo , Jian Yi , Long Huang , Lairong Yin","doi":"10.1016/j.robot.2024.104756","DOIUrl":null,"url":null,"abstract":"<div><p>This research presents a novel robot system that combines active and passive components to enhance compliance and dependability. The system is based on a continuous variable stiffness wrist. A wrist was created that met the requirements and a combination of active and passive control methods was suggested to insert and regulate forces effectively. The control strategy is based on the Cosserat rod model, with the fundamental concept being calculating the position and orientation of the component using data on the force exerted during contact between the parts and the stiffness of the contact between the shaft and hole components. This process converts the hard assembly into a flexible contact. Compliance is monitored via force and vision sensors, which allows for the shaft-hole assembly operation to be carried out even with attitude alignment problems, resulting in a notable decrease in the precision needed for component alignment. Initially, the camera supplies the first positional data of the shaft component for the robotic system. In addition, the performance of the wrist with variable stiffness is evaluated in terms of stiffness. Additionally, the calculation of relative deformation between components is examined using contact force information. Moreover, a robust active/passive hybrid insertion control technique, which relies on contact force, is proposed. Finally, the shaft-hole assembly task substantiates the necessity for contact force monitoring in the insertion assembly process. This control technique has demonstrated its efficacy in ensuring passive-compliant assembly performance. Furthermore, the variable stiffness wrist has been employed in robotic grinding for surfaces with curved contours to validate its effectiveness.</p></div>","PeriodicalId":49592,"journal":{"name":"Robotics and Autonomous Systems","volume":"180 ","pages":"Article 104756"},"PeriodicalIF":5.2000,"publicationDate":"2024-10-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Hybrid compliant control with variable-stiffness wrist for assembly and grinding application\",\"authors\":\"Du Xu , Haijie Mo , Jian Yi , Long Huang , Lairong Yin\",\"doi\":\"10.1016/j.robot.2024.104756\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>This research presents a novel robot system that combines active and passive components to enhance compliance and dependability. The system is based on a continuous variable stiffness wrist. A wrist was created that met the requirements and a combination of active and passive control methods was suggested to insert and regulate forces effectively. The control strategy is based on the Cosserat rod model, with the fundamental concept being calculating the position and orientation of the component using data on the force exerted during contact between the parts and the stiffness of the contact between the shaft and hole components. This process converts the hard assembly into a flexible contact. Compliance is monitored via force and vision sensors, which allows for the shaft-hole assembly operation to be carried out even with attitude alignment problems, resulting in a notable decrease in the precision needed for component alignment. Initially, the camera supplies the first positional data of the shaft component for the robotic system. In addition, the performance of the wrist with variable stiffness is evaluated in terms of stiffness. Additionally, the calculation of relative deformation between components is examined using contact force information. Moreover, a robust active/passive hybrid insertion control technique, which relies on contact force, is proposed. Finally, the shaft-hole assembly task substantiates the necessity for contact force monitoring in the insertion assembly process. This control technique has demonstrated its efficacy in ensuring passive-compliant assembly performance. Furthermore, the variable stiffness wrist has been employed in robotic grinding for surfaces with curved contours to validate its effectiveness.</p></div>\",\"PeriodicalId\":49592,\"journal\":{\"name\":\"Robotics and Autonomous Systems\",\"volume\":\"180 \",\"pages\":\"Article 104756\"},\"PeriodicalIF\":5.2000,\"publicationDate\":\"2024-10-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Robotics and Autonomous Systems\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0921889024001404\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/7/18 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and Autonomous Systems","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0921889024001404","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/7/18 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
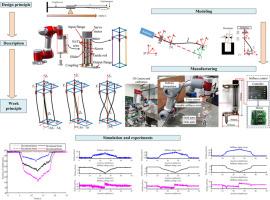
Hybrid compliant control with variable-stiffness wrist for assembly and grinding application
This research presents a novel robot system that combines active and passive components to enhance compliance and dependability. The system is based on a continuous variable stiffness wrist. A wrist was created that met the requirements and a combination of active and passive control methods was suggested to insert and regulate forces effectively. The control strategy is based on the Cosserat rod model, with the fundamental concept being calculating the position and orientation of the component using data on the force exerted during contact between the parts and the stiffness of the contact between the shaft and hole components. This process converts the hard assembly into a flexible contact. Compliance is monitored via force and vision sensors, which allows for the shaft-hole assembly operation to be carried out even with attitude alignment problems, resulting in a notable decrease in the precision needed for component alignment. Initially, the camera supplies the first positional data of the shaft component for the robotic system. In addition, the performance of the wrist with variable stiffness is evaluated in terms of stiffness. Additionally, the calculation of relative deformation between components is examined using contact force information. Moreover, a robust active/passive hybrid insertion control technique, which relies on contact force, is proposed. Finally, the shaft-hole assembly task substantiates the necessity for contact force monitoring in the insertion assembly process. This control technique has demonstrated its efficacy in ensuring passive-compliant assembly performance. Furthermore, the variable stiffness wrist has been employed in robotic grinding for surfaces with curved contours to validate its effectiveness.
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
