{"title":"利用计算机视觉和 3D 打印设备快速准确地锁定互锁髓内钉的远端。","authors":"Zakaria Chabihi, Nizar Nouidi, Brahim Demnati, Mohamed Amine Benhima, Imad Abkari","doi":"10.1186/s41205-024-00221-2","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Distal locking is a challenging and time-consuming step in interlocked intramedullary nailing of long bone fractures. Current methods have limitations in terms of simplicity, universality, accuracy, speed, and safety. We propose a novel device and software for distal locking using computer vision.</p><p><strong>Methods and materials: </strong>The device consists of an universal ancillary clamp, a telescopic arm, a viewfinder clamp, and a radio-opaque cross. The software uses a camera photo from the C-arm intensifier and adjusts for geometric projection deformities. The software employs edge detection, Hough transform, perspective interpolation, and vector calculation algorithms to locate the distal hole center. The device and software were designed, manufactured, and tested using 3D CAD, FEM, DRR, and performance testing on phantom bones.</p><p><strong>Results: </strong>The device and software showed high accuracy and precision of 98.7% and 99.2% respectively in locating the distal hole center and calculating the correctional vector. The device and software also showed high success ratio in drilling the hole and inserting the screw. The device and software reduced the radiation exposure for the surgeon and the patient. The success ratio of the device and software was validated by the physical testing, which simulated the real clinical scenario of distal locking. The radiation exposure was as low as 5 s with a radiation dose of 0.2mSv, drastically reducing radiation exposure during distal locking.</p><p><strong>Discussion: </strong>Our device and software have several advantages over other distal locking methods, such as simplicity, universality, accuracy, speed, and safety. Our device and software also have some disadvantages, such as reliability and legislation. Our device and software can be compared with other distal locking methods based on these criteria. Our device and software have some limitations and challenges that need to be addressed in the future, such as clinical validation, and regulatory approval.</p><p><strong>Conclusion: </strong>The device showed promising results in terms of low-cost, reusability, low radiation exposure, high accuracy, fast distal locking, high stiffness, and adaptability. The device has several advantages over other distal locking techniques, such as free-hand technique, mechanical aiming devices, electromagnetic navigation systems, and computer-assisted systems. We believe that our device and software have the potential to revolutionize the distal locking technique and to improve the outcomes and quality of life of the patients with long bone fractures.</p>","PeriodicalId":72036,"journal":{"name":"3D printing in medicine","volume":"10 1","pages":"28"},"PeriodicalIF":3.1000,"publicationDate":"2024-08-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11304628/pdf/","citationCount":"0","resultStr":"{\"title\":\"Fast and accurate distal locking of interlocked intramedullary nails using computer-vision and a 3D printed device.\",\"authors\":\"Zakaria Chabihi, Nizar Nouidi, Brahim Demnati, Mohamed Amine Benhima, Imad Abkari\",\"doi\":\"10.1186/s41205-024-00221-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>Distal locking is a challenging and time-consuming step in interlocked intramedullary nailing of long bone fractures. Current methods have limitations in terms of simplicity, universality, accuracy, speed, and safety. We propose a novel device and software for distal locking using computer vision.</p><p><strong>Methods and materials: </strong>The device consists of an universal ancillary clamp, a telescopic arm, a viewfinder clamp, and a radio-opaque cross. The software uses a camera photo from the C-arm intensifier and adjusts for geometric projection deformities. The software employs edge detection, Hough transform, perspective interpolation, and vector calculation algorithms to locate the distal hole center. The device and software were designed, manufactured, and tested using 3D CAD, FEM, DRR, and performance testing on phantom bones.</p><p><strong>Results: </strong>The device and software showed high accuracy and precision of 98.7% and 99.2% respectively in locating the distal hole center and calculating the correctional vector. The device and software also showed high success ratio in drilling the hole and inserting the screw. The device and software reduced the radiation exposure for the surgeon and the patient. The success ratio of the device and software was validated by the physical testing, which simulated the real clinical scenario of distal locking. The radiation exposure was as low as 5 s with a radiation dose of 0.2mSv, drastically reducing radiation exposure during distal locking.</p><p><strong>Discussion: </strong>Our device and software have several advantages over other distal locking methods, such as simplicity, universality, accuracy, speed, and safety. Our device and software also have some disadvantages, such as reliability and legislation. Our device and software can be compared with other distal locking methods based on these criteria. Our device and software have some limitations and challenges that need to be addressed in the future, such as clinical validation, and regulatory approval.</p><p><strong>Conclusion: </strong>The device showed promising results in terms of low-cost, reusability, low radiation exposure, high accuracy, fast distal locking, high stiffness, and adaptability. The device has several advantages over other distal locking techniques, such as free-hand technique, mechanical aiming devices, electromagnetic navigation systems, and computer-assisted systems. We believe that our device and software have the potential to revolutionize the distal locking technique and to improve the outcomes and quality of life of the patients with long bone fractures.</p>\",\"PeriodicalId\":72036,\"journal\":{\"name\":\"3D printing in medicine\",\"volume\":\"10 1\",\"pages\":\"28\"},\"PeriodicalIF\":3.1000,\"publicationDate\":\"2024-08-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11304628/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"3D printing in medicine\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1186/s41205-024-00221-2\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"RADIOLOGY, NUCLEAR MEDICINE & MEDICAL IMAGING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"3D printing in medicine","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s41205-024-00221-2","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"RADIOLOGY, NUCLEAR MEDICINE & MEDICAL IMAGING","Score":null,"Total":0}
Fast and accurate distal locking of interlocked intramedullary nails using computer-vision and a 3D printed device.
Introduction: Distal locking is a challenging and time-consuming step in interlocked intramedullary nailing of long bone fractures. Current methods have limitations in terms of simplicity, universality, accuracy, speed, and safety. We propose a novel device and software for distal locking using computer vision.
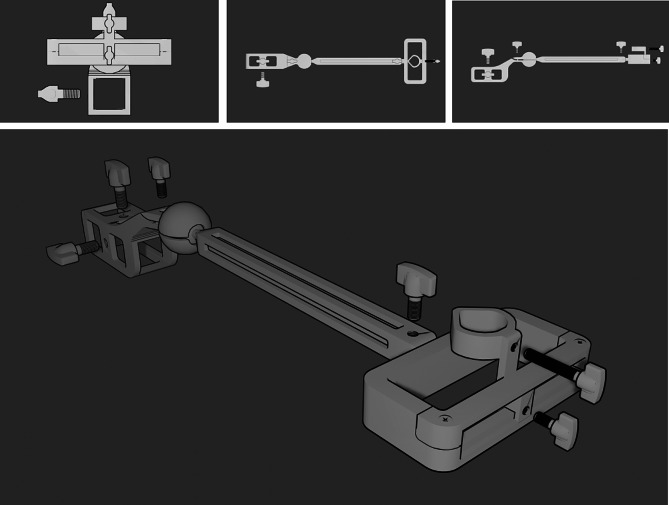
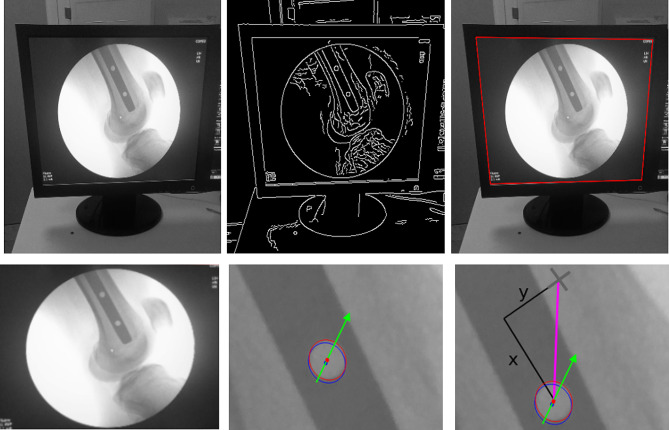
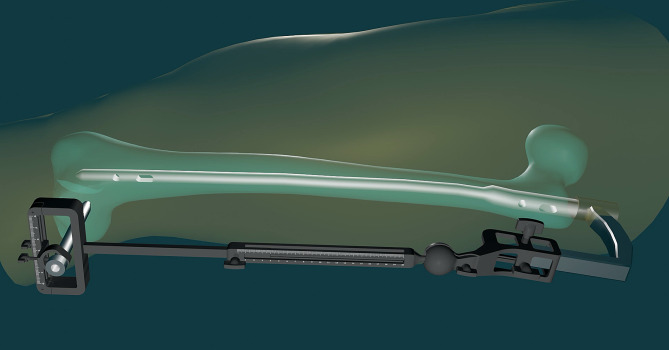
Methods and materials: The device consists of an universal ancillary clamp, a telescopic arm, a viewfinder clamp, and a radio-opaque cross. The software uses a camera photo from the C-arm intensifier and adjusts for geometric projection deformities. The software employs edge detection, Hough transform, perspective interpolation, and vector calculation algorithms to locate the distal hole center. The device and software were designed, manufactured, and tested using 3D CAD, FEM, DRR, and performance testing on phantom bones.
Results: The device and software showed high accuracy and precision of 98.7% and 99.2% respectively in locating the distal hole center and calculating the correctional vector. The device and software also showed high success ratio in drilling the hole and inserting the screw. The device and software reduced the radiation exposure for the surgeon and the patient. The success ratio of the device and software was validated by the physical testing, which simulated the real clinical scenario of distal locking. The radiation exposure was as low as 5 s with a radiation dose of 0.2mSv, drastically reducing radiation exposure during distal locking.
Discussion: Our device and software have several advantages over other distal locking methods, such as simplicity, universality, accuracy, speed, and safety. Our device and software also have some disadvantages, such as reliability and legislation. Our device and software can be compared with other distal locking methods based on these criteria. Our device and software have some limitations and challenges that need to be addressed in the future, such as clinical validation, and regulatory approval.
Conclusion: The device showed promising results in terms of low-cost, reusability, low radiation exposure, high accuracy, fast distal locking, high stiffness, and adaptability. The device has several advantages over other distal locking techniques, such as free-hand technique, mechanical aiming devices, electromagnetic navigation systems, and computer-assisted systems. We believe that our device and software have the potential to revolutionize the distal locking technique and to improve the outcomes and quality of life of the patients with long bone fractures.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
