{"title":"在微型致动器中编程分层各向异性,以实现多模态致动。","authors":"Shiyu Wang, Shucong Li, Wenchang Zhao, Ying Zhou, Liqiu Wang, Joanna Aizenberg and Pingan Zhu","doi":"10.1039/D4LC00369A","DOIUrl":null,"url":null,"abstract":"<p >Microactuators, capable of executing tasks typically repetitive, hazardous, or impossible for humans, hold great promise across fields such as precision medicine, environmental remediation, and swarm intelligence. However, intricate motions of microactuators normally require high complexity in design, making it increasingly challenging to realize at small scales using existing fabrication techniques. Taking inspiration from the hierarchical-anisotropy principle found in nature, we program liquid crystalline elastomer (LCE) microactuators with multimodal actuation tailored to their molecular, shape, and architectural anisotropies at (sub)nanometer, micrometer, and (sub)millimeter scales, respectively. Our strategy enables diverse deformations with individual LCE microstructures, including expanding, contracting, twisting, bending, and unwinding, as well as re-programmable shape transformations of assembled LCE architectures with negative Poisson's ratios, locally adjustable actuation, and changing from two-dimensional (2D) to three-dimensional (3D) structures. Furthermore, we design tetrahedral microactuators with well-controlled mobility and precise manipulation of both solids and liquids in various environments. This study provides a paradigm shift in the development of microactuators, unlocking a vast array of complexities achievable through manipulation at each hierarchical level of anisotropy.</p>","PeriodicalId":85,"journal":{"name":"Lab on a Chip","volume":" 17","pages":" 4073-4084"},"PeriodicalIF":5.4000,"publicationDate":"2024-08-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Programming hierarchical anisotropy in microactuators for multimodal actuation†\",\"authors\":\"Shiyu Wang, Shucong Li, Wenchang Zhao, Ying Zhou, Liqiu Wang, Joanna Aizenberg and Pingan Zhu\",\"doi\":\"10.1039/D4LC00369A\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >Microactuators, capable of executing tasks typically repetitive, hazardous, or impossible for humans, hold great promise across fields such as precision medicine, environmental remediation, and swarm intelligence. However, intricate motions of microactuators normally require high complexity in design, making it increasingly challenging to realize at small scales using existing fabrication techniques. Taking inspiration from the hierarchical-anisotropy principle found in nature, we program liquid crystalline elastomer (LCE) microactuators with multimodal actuation tailored to their molecular, shape, and architectural anisotropies at (sub)nanometer, micrometer, and (sub)millimeter scales, respectively. Our strategy enables diverse deformations with individual LCE microstructures, including expanding, contracting, twisting, bending, and unwinding, as well as re-programmable shape transformations of assembled LCE architectures with negative Poisson's ratios, locally adjustable actuation, and changing from two-dimensional (2D) to three-dimensional (3D) structures. Furthermore, we design tetrahedral microactuators with well-controlled mobility and precise manipulation of both solids and liquids in various environments. This study provides a paradigm shift in the development of microactuators, unlocking a vast array of complexities achievable through manipulation at each hierarchical level of anisotropy.</p>\",\"PeriodicalId\":85,\"journal\":{\"name\":\"Lab on a Chip\",\"volume\":\" 17\",\"pages\":\" 4073-4084\"},\"PeriodicalIF\":5.4000,\"publicationDate\":\"2024-08-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Lab on a Chip\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://pubs.rsc.org/en/content/articlelanding/2024/lc/d4lc00369a\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"BIOCHEMICAL RESEARCH METHODS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Lab on a Chip","FirstCategoryId":"5","ListUrlMain":"https://pubs.rsc.org/en/content/articlelanding/2024/lc/d4lc00369a","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"BIOCHEMICAL RESEARCH METHODS","Score":null,"Total":0}
Programming hierarchical anisotropy in microactuators for multimodal actuation†
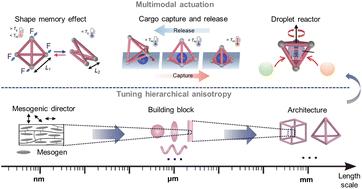
Microactuators, capable of executing tasks typically repetitive, hazardous, or impossible for humans, hold great promise across fields such as precision medicine, environmental remediation, and swarm intelligence. However, intricate motions of microactuators normally require high complexity in design, making it increasingly challenging to realize at small scales using existing fabrication techniques. Taking inspiration from the hierarchical-anisotropy principle found in nature, we program liquid crystalline elastomer (LCE) microactuators with multimodal actuation tailored to their molecular, shape, and architectural anisotropies at (sub)nanometer, micrometer, and (sub)millimeter scales, respectively. Our strategy enables diverse deformations with individual LCE microstructures, including expanding, contracting, twisting, bending, and unwinding, as well as re-programmable shape transformations of assembled LCE architectures with negative Poisson's ratios, locally adjustable actuation, and changing from two-dimensional (2D) to three-dimensional (3D) structures. Furthermore, we design tetrahedral microactuators with well-controlled mobility and precise manipulation of both solids and liquids in various environments. This study provides a paradigm shift in the development of microactuators, unlocking a vast array of complexities achievable through manipulation at each hierarchical level of anisotropy.
期刊介绍:
Lab on a Chip is the premiere journal that publishes cutting-edge research in the field of miniaturization. By their very nature, microfluidic/nanofluidic/miniaturized systems are at the intersection of disciplines, spanning fundamental research to high-end application, which is reflected by the broad readership of the journal. Lab on a Chip publishes two types of papers on original research: full-length research papers and communications. Papers should demonstrate innovations, which can come from technical advancements or applications addressing pressing needs in globally important areas. The journal also publishes Comments, Reviews, and Perspectives.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
