{"title":"复杂分布式参数系统的双尺度时空控制","authors":"Yaru Zhao, Han-Xiong Li","doi":"10.1002/rnc.7575","DOIUrl":null,"url":null,"abstract":"<p>It is very difficult to control the distributed parameter system (DPS) for consistent spatial performance. In this paper, a dual scale spatio-temporal control is designed for the DPS to achieve a consistent performance across the entire workspace under unknown exogenous disturbances. First, the generalized “spatial observer” should be designed under spectral decomposition/synthesis, to act as the nominal model of the DPS, through which the spatial mismatch between the model and the process could be estimated. Then a distributed disturbance compensator can be constructed to suppress all the undesirable spatial disturbance through the inner loop, and the compensated system will become closer to the nominal model and easier to control. Third, a dual controller will be designed in the outer loop for the final consistent spatial performance. Since the spatial performance is mainly affected by the dominant dynamics on the slow scale, a convex optimization algorithm can be effectively established in terms of nonlinear matrix inequalities for the dual controller. In this way, the nonlinear optimization problem is solved by converting it into the problem of a linear matrix inequalities with constraints. Besides, the spatio-temporal state variable of the controlled plant is demonstrated to converge in Hilbert space. The feasibility and effectiveness of the proposed control method are verified by temperature control of a catalytic rod, a benchmark in chemical reactors.</p>","PeriodicalId":50291,"journal":{"name":"International Journal of Robust and Nonlinear Control","volume":"34 17","pages":"11377-11395"},"PeriodicalIF":3.1000,"publicationDate":"2024-08-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rnc.7575","citationCount":"0","resultStr":"{\"title\":\"A dual scale spatio-temporal control for complex distributed parameter systems\",\"authors\":\"Yaru Zhao, Han-Xiong Li\",\"doi\":\"10.1002/rnc.7575\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>It is very difficult to control the distributed parameter system (DPS) for consistent spatial performance. In this paper, a dual scale spatio-temporal control is designed for the DPS to achieve a consistent performance across the entire workspace under unknown exogenous disturbances. First, the generalized “spatial observer” should be designed under spectral decomposition/synthesis, to act as the nominal model of the DPS, through which the spatial mismatch between the model and the process could be estimated. Then a distributed disturbance compensator can be constructed to suppress all the undesirable spatial disturbance through the inner loop, and the compensated system will become closer to the nominal model and easier to control. Third, a dual controller will be designed in the outer loop for the final consistent spatial performance. Since the spatial performance is mainly affected by the dominant dynamics on the slow scale, a convex optimization algorithm can be effectively established in terms of nonlinear matrix inequalities for the dual controller. In this way, the nonlinear optimization problem is solved by converting it into the problem of a linear matrix inequalities with constraints. Besides, the spatio-temporal state variable of the controlled plant is demonstrated to converge in Hilbert space. The feasibility and effectiveness of the proposed control method are verified by temperature control of a catalytic rod, a benchmark in chemical reactors.</p>\",\"PeriodicalId\":50291,\"journal\":{\"name\":\"International Journal of Robust and Nonlinear Control\",\"volume\":\"34 17\",\"pages\":\"11377-11395\"},\"PeriodicalIF\":3.1000,\"publicationDate\":\"2024-08-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rnc.7575\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Robust and Nonlinear Control\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/rnc.7575\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Robust and Nonlinear Control","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rnc.7575","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
A dual scale spatio-temporal control for complex distributed parameter systems
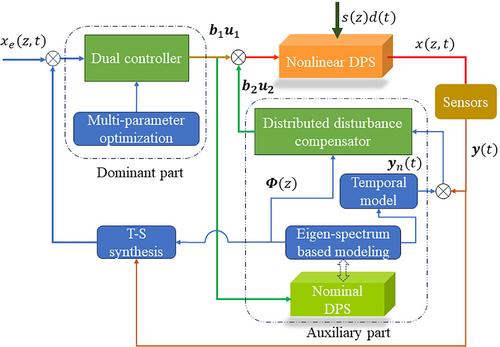
It is very difficult to control the distributed parameter system (DPS) for consistent spatial performance. In this paper, a dual scale spatio-temporal control is designed for the DPS to achieve a consistent performance across the entire workspace under unknown exogenous disturbances. First, the generalized “spatial observer” should be designed under spectral decomposition/synthesis, to act as the nominal model of the DPS, through which the spatial mismatch between the model and the process could be estimated. Then a distributed disturbance compensator can be constructed to suppress all the undesirable spatial disturbance through the inner loop, and the compensated system will become closer to the nominal model and easier to control. Third, a dual controller will be designed in the outer loop for the final consistent spatial performance. Since the spatial performance is mainly affected by the dominant dynamics on the slow scale, a convex optimization algorithm can be effectively established in terms of nonlinear matrix inequalities for the dual controller. In this way, the nonlinear optimization problem is solved by converting it into the problem of a linear matrix inequalities with constraints. Besides, the spatio-temporal state variable of the controlled plant is demonstrated to converge in Hilbert space. The feasibility and effectiveness of the proposed control method are verified by temperature control of a catalytic rod, a benchmark in chemical reactors.
期刊介绍:
Papers that do not include an element of robust or nonlinear control and estimation theory will not be considered by the journal, and all papers will be expected to include significant novel content. The focus of the journal is on model based control design approaches rather than heuristic or rule based methods. Papers on neural networks will have to be of exceptional novelty to be considered for the journal.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
