Zhengwu Wang, Jian Xiang, Jie Wang, Zhibo Gao, Tao Chen, Hao Li, Rui Mao
{"title":"考虑到车辆动力学,高速公路匝道上的 CAV 协同变道控制","authors":"Zhengwu Wang, Jian Xiang, Jie Wang, Zhibo Gao, Tao Chen, Hao Li, Rui Mao","doi":"10.1155/2024/1221717","DOIUrl":null,"url":null,"abstract":"<div>\n <p>This study proposes a cooperative lane-changing control framework for multiple vehicles in freeway ramp merging areas, aiming to achieve safe and efficient merging. Specifically, multiple connected and automated vehicles (CAVs) form triplets to participate in cooperative lane-changing. The framework consists of two stages: Longitudinal Headway Adjustment (LHA) and Lane-Changing Execution (LCE). In the LHA stage, a centralized longitudinal controller is developed based on the vehicle’s longitudinal dynamics model to optimize the longitudinal velocity of the cooperative vehicles and create suitable gaps for merging vehicles. In the LCE stage, an optimal lane-changing reference trajectory is generated using a quintic polynomial and a lateral controller is designed based on the vehicle’s lateral dynamics model. Model Predictive Control (MPC) is utilized for trajectory tracking. The simulation results obtained using MATLAB/Simulink, GPOPS, and CarSim demonstrate that the proposed control strategy can be applied to different vehicle speed control scenarios. Taking a specific velocity combination as an example, the cumulative control errors in the longitudinal and lateral directions for PV (Preceding Vehicle), SV (Subject Vehicle), and FV (Following Vehicle) are 1.4014 m, 0.5631 m, and −0.7601 m, respectively, satisfying the safety distance requirements. Compared to the Linear Quadratic Regulator (LQR) control, the proposed strategy improves control efficiency by 145.03%, 69.64%, 43.18%, and 67.61% in terms of comprehensive spacing errors, synthesized acceleration, front wheel angle, and speed fluctuation, respectively. These research findings highlight the superior performance of the proposed control strategy in terms of traffic efficiency, comfort, safety, and vehicle stability.</p>\n </div>","PeriodicalId":50259,"journal":{"name":"Journal of Advanced Transportation","volume":"2024 1","pages":""},"PeriodicalIF":2.2000,"publicationDate":"2024-08-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1155/2024/1221717","citationCount":"0","resultStr":"{\"title\":\"Cooperative Lane-Changing Control for CAVs at Freeway On-Ramps considering Vehicle Dynamics\",\"authors\":\"Zhengwu Wang, Jian Xiang, Jie Wang, Zhibo Gao, Tao Chen, Hao Li, Rui Mao\",\"doi\":\"10.1155/2024/1221717\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n <p>This study proposes a cooperative lane-changing control framework for multiple vehicles in freeway ramp merging areas, aiming to achieve safe and efficient merging. Specifically, multiple connected and automated vehicles (CAVs) form triplets to participate in cooperative lane-changing. The framework consists of two stages: Longitudinal Headway Adjustment (LHA) and Lane-Changing Execution (LCE). In the LHA stage, a centralized longitudinal controller is developed based on the vehicle’s longitudinal dynamics model to optimize the longitudinal velocity of the cooperative vehicles and create suitable gaps for merging vehicles. In the LCE stage, an optimal lane-changing reference trajectory is generated using a quintic polynomial and a lateral controller is designed based on the vehicle’s lateral dynamics model. Model Predictive Control (MPC) is utilized for trajectory tracking. The simulation results obtained using MATLAB/Simulink, GPOPS, and CarSim demonstrate that the proposed control strategy can be applied to different vehicle speed control scenarios. Taking a specific velocity combination as an example, the cumulative control errors in the longitudinal and lateral directions for PV (Preceding Vehicle), SV (Subject Vehicle), and FV (Following Vehicle) are 1.4014 m, 0.5631 m, and −0.7601 m, respectively, satisfying the safety distance requirements. Compared to the Linear Quadratic Regulator (LQR) control, the proposed strategy improves control efficiency by 145.03%, 69.64%, 43.18%, and 67.61% in terms of comprehensive spacing errors, synthesized acceleration, front wheel angle, and speed fluctuation, respectively. These research findings highlight the superior performance of the proposed control strategy in terms of traffic efficiency, comfort, safety, and vehicle stability.</p>\\n </div>\",\"PeriodicalId\":50259,\"journal\":{\"name\":\"Journal of Advanced Transportation\",\"volume\":\"2024 1\",\"pages\":\"\"},\"PeriodicalIF\":2.2000,\"publicationDate\":\"2024-08-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1155/2024/1221717\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Advanced Transportation\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1155/2024/1221717\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, CIVIL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Advanced Transportation","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1155/2024/1221717","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, CIVIL","Score":null,"Total":0}
Cooperative Lane-Changing Control for CAVs at Freeway On-Ramps considering Vehicle Dynamics
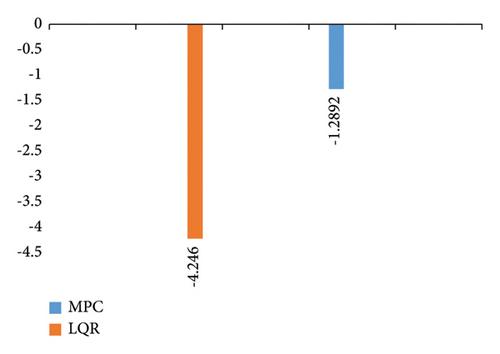
This study proposes a cooperative lane-changing control framework for multiple vehicles in freeway ramp merging areas, aiming to achieve safe and efficient merging. Specifically, multiple connected and automated vehicles (CAVs) form triplets to participate in cooperative lane-changing. The framework consists of two stages: Longitudinal Headway Adjustment (LHA) and Lane-Changing Execution (LCE). In the LHA stage, a centralized longitudinal controller is developed based on the vehicle’s longitudinal dynamics model to optimize the longitudinal velocity of the cooperative vehicles and create suitable gaps for merging vehicles. In the LCE stage, an optimal lane-changing reference trajectory is generated using a quintic polynomial and a lateral controller is designed based on the vehicle’s lateral dynamics model. Model Predictive Control (MPC) is utilized for trajectory tracking. The simulation results obtained using MATLAB/Simulink, GPOPS, and CarSim demonstrate that the proposed control strategy can be applied to different vehicle speed control scenarios. Taking a specific velocity combination as an example, the cumulative control errors in the longitudinal and lateral directions for PV (Preceding Vehicle), SV (Subject Vehicle), and FV (Following Vehicle) are 1.4014 m, 0.5631 m, and −0.7601 m, respectively, satisfying the safety distance requirements. Compared to the Linear Quadratic Regulator (LQR) control, the proposed strategy improves control efficiency by 145.03%, 69.64%, 43.18%, and 67.61% in terms of comprehensive spacing errors, synthesized acceleration, front wheel angle, and speed fluctuation, respectively. These research findings highlight the superior performance of the proposed control strategy in terms of traffic efficiency, comfort, safety, and vehicle stability.
期刊介绍:
The Journal of Advanced Transportation (JAT) is a fully peer reviewed international journal in transportation research areas related to public transit, road traffic, transport networks and air transport.
It publishes theoretical and innovative papers on analysis, design, operations, optimization and planning of multi-modal transport networks, transit & traffic systems, transport technology and traffic safety. Urban rail and bus systems, Pedestrian studies, traffic flow theory and control, Intelligent Transport Systems (ITS) and automated and/or connected vehicles are some topics of interest.
Highway engineering, railway engineering and logistics do not fall within the aims and scope of JAT.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
