{"title":"Dual-COPE:带有双 Sim2Real 无监督领域适应模块的基于先验的新式类别级物体姿态估计网络","authors":"Xi Ren , Nan Guo , Zichen Zhu , Xinbei Jiang","doi":"10.1016/j.cag.2024.104045","DOIUrl":null,"url":null,"abstract":"<div><p>Category-level pose estimation offers the generalization ability to novel objects unseen during training, which has attracted increasing attention in recent years. Despite the advantage, annotating real-world data with pose label is intricate and laborious. Although using synthetic data with free annotations can greatly reduce training costs, the Synthetic-to-Real (Sim2Real) domain gap could result in a sharp performance decline on real-world test. In this paper, we propose Dual-COPE, a novel prior-based category-level object pose estimation method with dual Sim2Real domain adaptation to avoid expensive real pose annotations. First, we propose an estimation network featured with conjoined prior deformation and transformer-based matching to realize high-precision pose prediction. Upon that, an efficient dual Sim2Real domain adaptation module is further designed to reduce the feature distribution discrepancy between synthetic and real-world data both semantically and geometrically, thus maintaining superior performance on real-world test. Moreover, the adaptation module is loosely coupled with estimation network, allowing for easy integration with other methods without any additional inference overhead. Comprehensive experiments show that Dual-COPE outperforms existing unsupervised methods and achieves state-of-the-art precision under supervised settings.</p></div>","PeriodicalId":50628,"journal":{"name":"Computers & Graphics-Uk","volume":"124 ","pages":"Article 104045"},"PeriodicalIF":2.8000,"publicationDate":"2024-11-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Dual-COPE: A novel prior-based category-level object pose estimation network with dual Sim2Real unsupervised domain adaptation module\",\"authors\":\"Xi Ren , Nan Guo , Zichen Zhu , Xinbei Jiang\",\"doi\":\"10.1016/j.cag.2024.104045\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Category-level pose estimation offers the generalization ability to novel objects unseen during training, which has attracted increasing attention in recent years. Despite the advantage, annotating real-world data with pose label is intricate and laborious. Although using synthetic data with free annotations can greatly reduce training costs, the Synthetic-to-Real (Sim2Real) domain gap could result in a sharp performance decline on real-world test. In this paper, we propose Dual-COPE, a novel prior-based category-level object pose estimation method with dual Sim2Real domain adaptation to avoid expensive real pose annotations. First, we propose an estimation network featured with conjoined prior deformation and transformer-based matching to realize high-precision pose prediction. Upon that, an efficient dual Sim2Real domain adaptation module is further designed to reduce the feature distribution discrepancy between synthetic and real-world data both semantically and geometrically, thus maintaining superior performance on real-world test. Moreover, the adaptation module is loosely coupled with estimation network, allowing for easy integration with other methods without any additional inference overhead. Comprehensive experiments show that Dual-COPE outperforms existing unsupervised methods and achieves state-of-the-art precision under supervised settings.</p></div>\",\"PeriodicalId\":50628,\"journal\":{\"name\":\"Computers & Graphics-Uk\",\"volume\":\"124 \",\"pages\":\"Article 104045\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2024-11-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Computers & Graphics-Uk\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0097849324001808\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/8/14 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, SOFTWARE ENGINEERING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computers & Graphics-Uk","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0097849324001808","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/8/14 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
Dual-COPE: A novel prior-based category-level object pose estimation network with dual Sim2Real unsupervised domain adaptation module
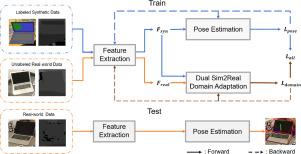
Category-level pose estimation offers the generalization ability to novel objects unseen during training, which has attracted increasing attention in recent years. Despite the advantage, annotating real-world data with pose label is intricate and laborious. Although using synthetic data with free annotations can greatly reduce training costs, the Synthetic-to-Real (Sim2Real) domain gap could result in a sharp performance decline on real-world test. In this paper, we propose Dual-COPE, a novel prior-based category-level object pose estimation method with dual Sim2Real domain adaptation to avoid expensive real pose annotations. First, we propose an estimation network featured with conjoined prior deformation and transformer-based matching to realize high-precision pose prediction. Upon that, an efficient dual Sim2Real domain adaptation module is further designed to reduce the feature distribution discrepancy between synthetic and real-world data both semantically and geometrically, thus maintaining superior performance on real-world test. Moreover, the adaptation module is loosely coupled with estimation network, allowing for easy integration with other methods without any additional inference overhead. Comprehensive experiments show that Dual-COPE outperforms existing unsupervised methods and achieves state-of-the-art precision under supervised settings.
期刊介绍:
Computers & Graphics is dedicated to disseminate information on research and applications of computer graphics (CG) techniques. The journal encourages articles on:
1. Research and applications of interactive computer graphics. We are particularly interested in novel interaction techniques and applications of CG to problem domains.
2. State-of-the-art papers on late-breaking, cutting-edge research on CG.
3. Information on innovative uses of graphics principles and technologies.
4. Tutorial papers on both teaching CG principles and innovative uses of CG in education.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
