Nils Lindner , Andres Mejia-Wille , Anna Fritschen , Andreas Blaeser
{"title":"开发用于大规模生物生产三维生物打印片上器官设备的机器人辅助处理和操纵系统","authors":"Nils Lindner , Andres Mejia-Wille , Anna Fritschen , Andreas Blaeser","doi":"10.1016/j.ohx.2024.e00572","DOIUrl":null,"url":null,"abstract":"<div><p>Organs-on-a-chip (OoCs) have proven to mimic the basic physiological behavior of organs and the influence of therapeutics on them in greater detail than conventional models, resulting in enormous projected market growth rates. However, the breakthrough to profitable commercialization of that technology has not yet been achieved, partly because the production process chain is characterized by a high proportion of manual laboratory work. The present work addresses this point. Utilizing affordable components, a demonstrator was developed that can be integrated into an existing 3D-bioprinting system and enables the automated production of perfusion-ready OoC devices starting from pre-fabricated injection-molded microfluidic chips. To this end, a corresponding process chain was first defined, and an expandable, configurable algorithm was developed and validated in the form of a finite state machine (FSM). This algorithm controls a modified 4-axis robot arm that covers the steps upstream and downstream of the printing process in the manufacturing process and achieves success rates of up to 100 %. A virtual interface between the robot and printer enables mutual communication and full integration of the algorithm into the process chain. Steps that pose a challenge for the automation of the process chain and appropriate countermeasures and optimizations were identified. This lays the foundation for scaling and standardizing the automated production of OoCs.</p></div>","PeriodicalId":37503,"journal":{"name":"HardwareX","volume":"19 ","pages":"Article e00572"},"PeriodicalIF":2.1000,"publicationDate":"2024-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S246806722400066X/pdfft?md5=9cc74006f150a61876809147fee64423&pid=1-s2.0-S246806722400066X-main.pdf","citationCount":"0","resultStr":"{\"title\":\"Development of a robotic-assisted handling and manipulation system for the high-scale bioproduction of 3D-bioprinted organ-on-a-chip devices\",\"authors\":\"Nils Lindner , Andres Mejia-Wille , Anna Fritschen , Andreas Blaeser\",\"doi\":\"10.1016/j.ohx.2024.e00572\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Organs-on-a-chip (OoCs) have proven to mimic the basic physiological behavior of organs and the influence of therapeutics on them in greater detail than conventional models, resulting in enormous projected market growth rates. However, the breakthrough to profitable commercialization of that technology has not yet been achieved, partly because the production process chain is characterized by a high proportion of manual laboratory work. The present work addresses this point. Utilizing affordable components, a demonstrator was developed that can be integrated into an existing 3D-bioprinting system and enables the automated production of perfusion-ready OoC devices starting from pre-fabricated injection-molded microfluidic chips. To this end, a corresponding process chain was first defined, and an expandable, configurable algorithm was developed and validated in the form of a finite state machine (FSM). This algorithm controls a modified 4-axis robot arm that covers the steps upstream and downstream of the printing process in the manufacturing process and achieves success rates of up to 100 %. A virtual interface between the robot and printer enables mutual communication and full integration of the algorithm into the process chain. Steps that pose a challenge for the automation of the process chain and appropriate countermeasures and optimizations were identified. This lays the foundation for scaling and standardizing the automated production of OoCs.</p></div>\",\"PeriodicalId\":37503,\"journal\":{\"name\":\"HardwareX\",\"volume\":\"19 \",\"pages\":\"Article e00572\"},\"PeriodicalIF\":2.1000,\"publicationDate\":\"2024-09-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S246806722400066X/pdfft?md5=9cc74006f150a61876809147fee64423&pid=1-s2.0-S246806722400066X-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"HardwareX\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S246806722400066X\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/8/22 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"HardwareX","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S246806722400066X","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/8/22 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Development of a robotic-assisted handling and manipulation system for the high-scale bioproduction of 3D-bioprinted organ-on-a-chip devices
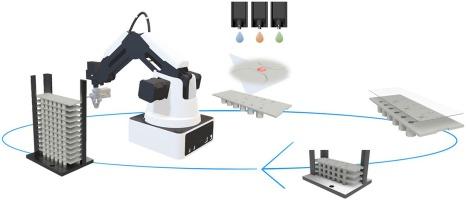
Organs-on-a-chip (OoCs) have proven to mimic the basic physiological behavior of organs and the influence of therapeutics on them in greater detail than conventional models, resulting in enormous projected market growth rates. However, the breakthrough to profitable commercialization of that technology has not yet been achieved, partly because the production process chain is characterized by a high proportion of manual laboratory work. The present work addresses this point. Utilizing affordable components, a demonstrator was developed that can be integrated into an existing 3D-bioprinting system and enables the automated production of perfusion-ready OoC devices starting from pre-fabricated injection-molded microfluidic chips. To this end, a corresponding process chain was first defined, and an expandable, configurable algorithm was developed and validated in the form of a finite state machine (FSM). This algorithm controls a modified 4-axis robot arm that covers the steps upstream and downstream of the printing process in the manufacturing process and achieves success rates of up to 100 %. A virtual interface between the robot and printer enables mutual communication and full integration of the algorithm into the process chain. Steps that pose a challenge for the automation of the process chain and appropriate countermeasures and optimizations were identified. This lays the foundation for scaling and standardizing the automated production of OoCs.
HardwareXEngineering-Industrial and Manufacturing Engineering
CiteScore
4.10
自引率
18.20%
发文量
124
审稿时长
24 weeks
期刊介绍:
HardwareX is an open access journal established to promote free and open source designing, building and customizing of scientific infrastructure (hardware). HardwareX aims to recognize researchers for the time and effort in developing scientific infrastructure while providing end-users with sufficient information to replicate and validate the advances presented. HardwareX is open to input from all scientific, technological and medical disciplines. Scientific infrastructure will be interpreted in the broadest sense. Including hardware modifications to existing infrastructure, sensors and tools that perform measurements and other functions outside of the traditional lab setting (such as wearables, air/water quality sensors, and low cost alternatives to existing tools), and the creation of wholly new tools for either standard or novel laboratory tasks. Authors are encouraged to submit hardware developments that address all aspects of science, not only the final measurement, for example, enhancements in sample preparation and handling, user safety, and quality control. The use of distributed digital manufacturing strategies (e.g. 3-D printing) is encouraged. All designs must be submitted under an open hardware license.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
