Muhammad Hanzla, Muhammad Ovais Yusuf, Naif Al Mudawi, Touseef Sadiq, Nouf Abdullah Almujally, Hameedur Rahman, Abdulwahab Alazeb, Asaad Algarni
{"title":"通过 DeepSort 对航空图像数据集进行车辆识别。","authors":"Muhammad Hanzla, Muhammad Ovais Yusuf, Naif Al Mudawi, Touseef Sadiq, Nouf Abdullah Almujally, Hameedur Rahman, Abdulwahab Alazeb, Asaad Algarni","doi":"10.3389/fnbot.2024.1430155","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Unmanned aerial vehicles (UAVs) are widely used in various computer vision applications, especially in intelligent traffic monitoring, as they are agile and simplify operations while boosting efficiency. However, automating these procedures is still a significant challenge due to the difficulty of extracting foreground (vehicle) information from complex traffic scenes.</p><p><strong>Methods: </strong>This paper presents a unique method for autonomous vehicle surveillance that uses FCM to segment aerial images. YOLOv8, which is known for its ability to detect tiny objects, is then used to detect vehicles. Additionally, a system that utilizes ORB features is employed to support vehicle recognition, assignment, and recovery across picture frames. Vehicle tracking is accomplished using DeepSORT, which elegantly combines Kalman filtering with deep learning to achieve precise results.</p><p><strong>Results: </strong>Our proposed model demonstrates remarkable performance in vehicle identification and tracking with precision of 0.86 and 0.84 on the VEDAI and SRTID datasets, respectively, for vehicle detection.</p><p><strong>Discussion: </strong>For vehicle tracking, the model achieves accuracies of 0.89 and 0.85 on the VEDAI and SRTID datasets, respectively.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"18 ","pages":"1430155"},"PeriodicalIF":2.8000,"publicationDate":"2024-08-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11362136/pdf/","citationCount":"0","resultStr":"{\"title\":\"Vehicle recognition pipeline via DeepSort on aerial image datasets.\",\"authors\":\"Muhammad Hanzla, Muhammad Ovais Yusuf, Naif Al Mudawi, Touseef Sadiq, Nouf Abdullah Almujally, Hameedur Rahman, Abdulwahab Alazeb, Asaad Algarni\",\"doi\":\"10.3389/fnbot.2024.1430155\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>Unmanned aerial vehicles (UAVs) are widely used in various computer vision applications, especially in intelligent traffic monitoring, as they are agile and simplify operations while boosting efficiency. However, automating these procedures is still a significant challenge due to the difficulty of extracting foreground (vehicle) information from complex traffic scenes.</p><p><strong>Methods: </strong>This paper presents a unique method for autonomous vehicle surveillance that uses FCM to segment aerial images. YOLOv8, which is known for its ability to detect tiny objects, is then used to detect vehicles. Additionally, a system that utilizes ORB features is employed to support vehicle recognition, assignment, and recovery across picture frames. Vehicle tracking is accomplished using DeepSORT, which elegantly combines Kalman filtering with deep learning to achieve precise results.</p><p><strong>Results: </strong>Our proposed model demonstrates remarkable performance in vehicle identification and tracking with precision of 0.86 and 0.84 on the VEDAI and SRTID datasets, respectively, for vehicle detection.</p><p><strong>Discussion: </strong>For vehicle tracking, the model achieves accuracies of 0.89 and 0.85 on the VEDAI and SRTID datasets, respectively.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"18 \",\"pages\":\"1430155\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2024-08-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11362136/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2024.1430155\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2024.1430155","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Vehicle recognition pipeline via DeepSort on aerial image datasets.
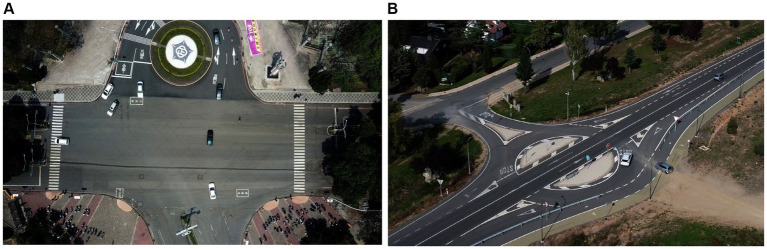
Introduction: Unmanned aerial vehicles (UAVs) are widely used in various computer vision applications, especially in intelligent traffic monitoring, as they are agile and simplify operations while boosting efficiency. However, automating these procedures is still a significant challenge due to the difficulty of extracting foreground (vehicle) information from complex traffic scenes.
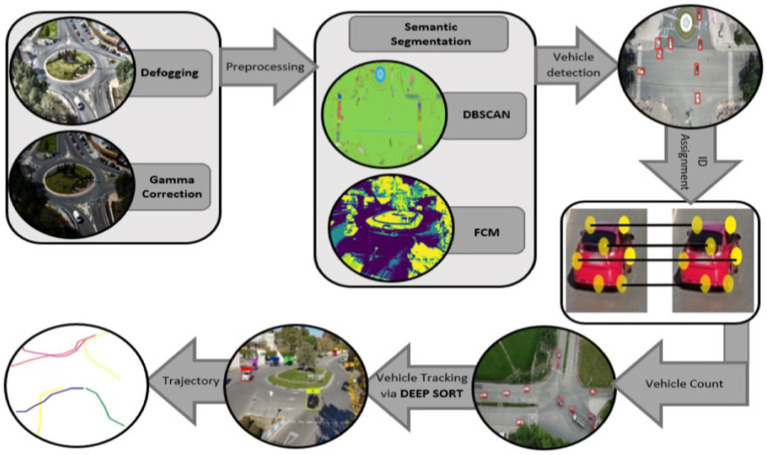
Methods: This paper presents a unique method for autonomous vehicle surveillance that uses FCM to segment aerial images. YOLOv8, which is known for its ability to detect tiny objects, is then used to detect vehicles. Additionally, a system that utilizes ORB features is employed to support vehicle recognition, assignment, and recovery across picture frames. Vehicle tracking is accomplished using DeepSORT, which elegantly combines Kalman filtering with deep learning to achieve precise results.
Results: Our proposed model demonstrates remarkable performance in vehicle identification and tracking with precision of 0.86 and 0.84 on the VEDAI and SRTID datasets, respectively, for vehicle detection.
Discussion: For vehicle tracking, the model achieves accuracies of 0.89 and 0.85 on the VEDAI and SRTID datasets, respectively.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
