{"title":"使用实时机器人光学相干断层扫描进行移植前评估的大面积肾脏成像。","authors":"Xihan Ma, Mousa Moradi, Xiaoyu Ma, Qinggong Tang, Moshe Levi, Yu Chen, Haichong K. Zhang","doi":"10.1038/s44172-024-00264-7","DOIUrl":null,"url":null,"abstract":"Optical coherence tomography (OCT) can be used to image microstructures of human kidneys. However, current OCT probes exhibit inadequate field-of-view, leading to potentially biased kidney assessment. Here we present a robotic OCT system where the probe is integrated to a robot manipulator, enabling wider area (covers an area of 106.39 mm by 37.70 mm) spatially-resolved imaging. Our system comprehensively scans the kidney surface at the optimal altitude with preoperative path planning and OCT image-based feedback control scheme. It further parameterizes and visualizes microstructures of large area. We verified the system positioning accuracy on a phantom as 0.0762 ± 0.0727 mm and showed the clinical feasibility by scanning ex vivo kidneys. The parameterization reveals vasculatures beneath the kidney surface. Quantification on the proximal convoluted tubule of a human kidney yields clinical-relevant information. The system promises to assess kidney viability for transplantation after collecting a vast amount of whole-organ parameterization and patient outcomes data. Xihan Ma and colleagues expand the field-of-view for optical coherence tomography using a robotic manipulator to control the probe. They achieve high position precision in ex vivo demonstration.","PeriodicalId":72644,"journal":{"name":"Communications engineering","volume":" ","pages":"1-12"},"PeriodicalIF":7.0000,"publicationDate":"2024-09-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11368928/pdf/","citationCount":"0","resultStr":"{\"title\":\"Large area kidney imaging for pre-transplant evaluation using real-time robotic optical coherence tomography\",\"authors\":\"Xihan Ma, Mousa Moradi, Xiaoyu Ma, Qinggong Tang, Moshe Levi, Yu Chen, Haichong K. Zhang\",\"doi\":\"10.1038/s44172-024-00264-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Optical coherence tomography (OCT) can be used to image microstructures of human kidneys. However, current OCT probes exhibit inadequate field-of-view, leading to potentially biased kidney assessment. Here we present a robotic OCT system where the probe is integrated to a robot manipulator, enabling wider area (covers an area of 106.39 mm by 37.70 mm) spatially-resolved imaging. Our system comprehensively scans the kidney surface at the optimal altitude with preoperative path planning and OCT image-based feedback control scheme. It further parameterizes and visualizes microstructures of large area. We verified the system positioning accuracy on a phantom as 0.0762 ± 0.0727 mm and showed the clinical feasibility by scanning ex vivo kidneys. The parameterization reveals vasculatures beneath the kidney surface. Quantification on the proximal convoluted tubule of a human kidney yields clinical-relevant information. The system promises to assess kidney viability for transplantation after collecting a vast amount of whole-organ parameterization and patient outcomes data. Xihan Ma and colleagues expand the field-of-view for optical coherence tomography using a robotic manipulator to control the probe. They achieve high position precision in ex vivo demonstration.\",\"PeriodicalId\":72644,\"journal\":{\"name\":\"Communications engineering\",\"volume\":\" \",\"pages\":\"1-12\"},\"PeriodicalIF\":7.0000,\"publicationDate\":\"2024-09-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11368928/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Communications engineering\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.nature.com/articles/s44172-024-00264-7\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Communications engineering","FirstCategoryId":"1085","ListUrlMain":"https://www.nature.com/articles/s44172-024-00264-7","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
摘要
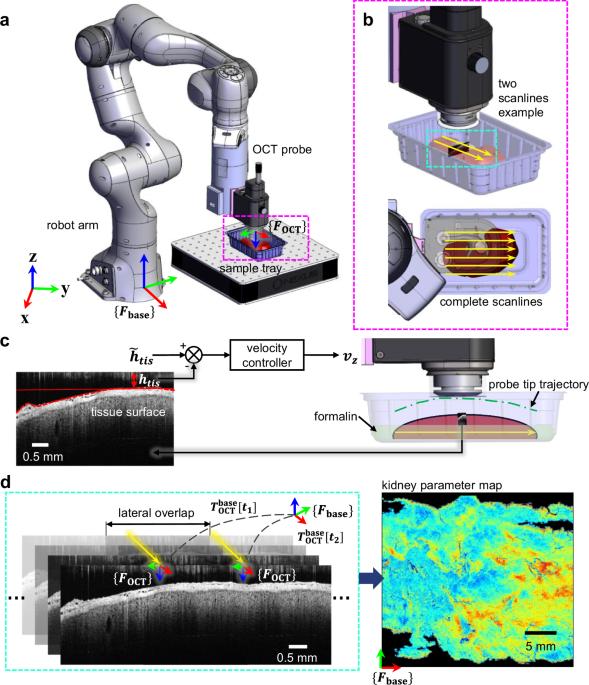
光学相干断层扫描(OCT)可用于成像人体肾脏的微观结构。然而,目前的 OCT 探头视场不足,导致对肾脏的评估可能存在偏差。在这里,我们展示了一种机器人 OCT 系统,该系统将探头集成到机器人操纵器上,实现了更大面积(覆盖面积 106.39 毫米 x 37.70 毫米)的空间分辨成像。我们的系统通过术前路径规划和基于 OCT 图像的反馈控制方案,以最佳高度全面扫描肾脏表面。它还能进一步参数化和可视化大面积的微观结构。我们在模型上验证了系统的定位精度为 0.0762 ± 0.0727 毫米,并通过扫描体外肾脏证明了其临床可行性。参数化显示了肾脏表面下的血管。对人体肾脏近端曲小管的定量分析产生了与临床相关的信息。该系统有望在收集大量全器官参数化数据和患者预后数据后,评估肾脏在移植手术中的存活能力。
Large area kidney imaging for pre-transplant evaluation using real-time robotic optical coherence tomography
Optical coherence tomography (OCT) can be used to image microstructures of human kidneys. However, current OCT probes exhibit inadequate field-of-view, leading to potentially biased kidney assessment. Here we present a robotic OCT system where the probe is integrated to a robot manipulator, enabling wider area (covers an area of 106.39 mm by 37.70 mm) spatially-resolved imaging. Our system comprehensively scans the kidney surface at the optimal altitude with preoperative path planning and OCT image-based feedback control scheme. It further parameterizes and visualizes microstructures of large area. We verified the system positioning accuracy on a phantom as 0.0762 ± 0.0727 mm and showed the clinical feasibility by scanning ex vivo kidneys. The parameterization reveals vasculatures beneath the kidney surface. Quantification on the proximal convoluted tubule of a human kidney yields clinical-relevant information. The system promises to assess kidney viability for transplantation after collecting a vast amount of whole-organ parameterization and patient outcomes data. Xihan Ma and colleagues expand the field-of-view for optical coherence tomography using a robotic manipulator to control the probe. They achieve high position precision in ex vivo demonstration.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
