Yuyan Qi, Jiaqi Shao, Yongjian Zhao, Tong Niu, Yi Yang, Songyi Zhong, Shaorong Xie, Yangqiao Lin, Yang Yang
{"title":"受蛇吞食启发的气动柔性线性推杆","authors":"Yuyan Qi, Jiaqi Shao, Yongjian Zhao, Tong Niu, Yi Yang, Songyi Zhong, Shaorong Xie, Yangqiao Lin, Yang Yang","doi":"10.1002/advs.202405051","DOIUrl":null,"url":null,"abstract":"<p>Soft robots spark a revolution in human–machine interaction. However, developing high-performance soft actuators remains challenging due to trade-offs among output force, driving distance, control precision, safety, and compliance. Here, addressing the lack of long-distance, high-precision flexible linear actuators, an innovative pneumatic flexible linear actuator (PFLA) is introduced, inspired by the smooth and controlled process observed in snakes ingesting sizable food, such as eggs. This PFLA combines a soft tube, emulating the snake's body cavity, with a pneumatically driven piston. Through the joint modulation of moving resistance and driving force by pneumatic pressure, the PFLA exhibits exceptional motion control capabilities, including self-holding without pressure supply, smooth low-speed motion (down to 0.004 m s<sup>–1</sup>), high-speed motion (up to 5.6 m s<sup>–1</sup>) with low air pressure demand, and a self-protection mechanism. Highlighting its adaptability and versatility, the PFLA finds applications in various settings, including a wearable assistive devices, a manipulator capable of precise path tracking and positioning, and rapid transportation in diverse environments for pipeline inspection and firefighting. This PFLA combines biomimetic principles with sophisticated fluidic actuation to achieve long-distance, flexible, precise, and safe actuation, offering a more adaptive solution for force/motion transmission, particularly in challenging environments.</p>","PeriodicalId":117,"journal":{"name":"Advanced Science","volume":"11 41","pages":""},"PeriodicalIF":14.1000,"publicationDate":"2024-09-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/advs.202405051","citationCount":"0","resultStr":"{\"title\":\"A Pneumatic Flexible Linear Actuator Inspired by Snake Swallowing\",\"authors\":\"Yuyan Qi, Jiaqi Shao, Yongjian Zhao, Tong Niu, Yi Yang, Songyi Zhong, Shaorong Xie, Yangqiao Lin, Yang Yang\",\"doi\":\"10.1002/advs.202405051\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Soft robots spark a revolution in human–machine interaction. However, developing high-performance soft actuators remains challenging due to trade-offs among output force, driving distance, control precision, safety, and compliance. Here, addressing the lack of long-distance, high-precision flexible linear actuators, an innovative pneumatic flexible linear actuator (PFLA) is introduced, inspired by the smooth and controlled process observed in snakes ingesting sizable food, such as eggs. This PFLA combines a soft tube, emulating the snake's body cavity, with a pneumatically driven piston. Through the joint modulation of moving resistance and driving force by pneumatic pressure, the PFLA exhibits exceptional motion control capabilities, including self-holding without pressure supply, smooth low-speed motion (down to 0.004 m s<sup>–1</sup>), high-speed motion (up to 5.6 m s<sup>–1</sup>) with low air pressure demand, and a self-protection mechanism. Highlighting its adaptability and versatility, the PFLA finds applications in various settings, including a wearable assistive devices, a manipulator capable of precise path tracking and positioning, and rapid transportation in diverse environments for pipeline inspection and firefighting. This PFLA combines biomimetic principles with sophisticated fluidic actuation to achieve long-distance, flexible, precise, and safe actuation, offering a more adaptive solution for force/motion transmission, particularly in challenging environments.</p>\",\"PeriodicalId\":117,\"journal\":{\"name\":\"Advanced Science\",\"volume\":\"11 41\",\"pages\":\"\"},\"PeriodicalIF\":14.1000,\"publicationDate\":\"2024-09-12\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/advs.202405051\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Science\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/advs.202405051\",\"RegionNum\":1,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Science","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/advs.202405051","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
A Pneumatic Flexible Linear Actuator Inspired by Snake Swallowing
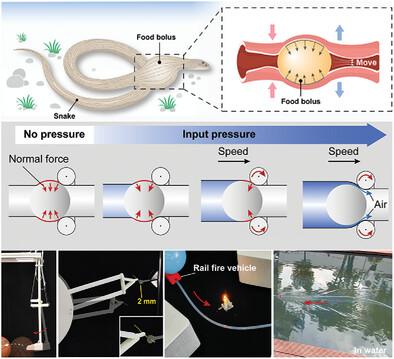
Soft robots spark a revolution in human–machine interaction. However, developing high-performance soft actuators remains challenging due to trade-offs among output force, driving distance, control precision, safety, and compliance. Here, addressing the lack of long-distance, high-precision flexible linear actuators, an innovative pneumatic flexible linear actuator (PFLA) is introduced, inspired by the smooth and controlled process observed in snakes ingesting sizable food, such as eggs. This PFLA combines a soft tube, emulating the snake's body cavity, with a pneumatically driven piston. Through the joint modulation of moving resistance and driving force by pneumatic pressure, the PFLA exhibits exceptional motion control capabilities, including self-holding without pressure supply, smooth low-speed motion (down to 0.004 m s–1), high-speed motion (up to 5.6 m s–1) with low air pressure demand, and a self-protection mechanism. Highlighting its adaptability and versatility, the PFLA finds applications in various settings, including a wearable assistive devices, a manipulator capable of precise path tracking and positioning, and rapid transportation in diverse environments for pipeline inspection and firefighting. This PFLA combines biomimetic principles with sophisticated fluidic actuation to achieve long-distance, flexible, precise, and safe actuation, offering a more adaptive solution for force/motion transmission, particularly in challenging environments.
期刊介绍:
Advanced Science is a prestigious open access journal that focuses on interdisciplinary research in materials science, physics, chemistry, medical and life sciences, and engineering. The journal aims to promote cutting-edge research by employing a rigorous and impartial review process. It is committed to presenting research articles with the highest quality production standards, ensuring maximum accessibility of top scientific findings. With its vibrant and innovative publication platform, Advanced Science seeks to revolutionize the dissemination and organization of scientific knowledge.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
