{"title":"具有精度和承重能力的仿生锥形软机械手","authors":"Xianglong Li, Shouyi Zhang, Quan Xiong, Dongbao Sui, Qinghua Zhang, Ziqi Wang, Lingkai Luan, Tianjiao Zheng, Jizhuang Fan, Jie Zhao, Yanhe Zhu","doi":"10.1016/j.xcrp.2024.102210","DOIUrl":null,"url":null,"abstract":"<p>Designing a soft manipulator that effectively serves human applications presents significant challenges, especially in motion robustness and accuracy. The elephant trunk, with its flexibility, strong load-bearing capacity, and dexterous yet soft tip, provides an inspiring model. Inspired by the elephant trunk’s thrust-deformation mechanism under multi-muscle action, we present the design principles of a composite tendon and pneumatic hybrid-driven tapered soft manipulator (TSM). Simulation and testing show that the TSM achieves a repeatability accuracy of 0.69 <span><span style=\"\"></span><span data-mathml='<math xmlns=\"http://www.w3.org/1998/Math/MathML\"><mrow is=\"true\"><mo linebreak=\"goodbreak\" linebreakstyle=\"after\" is=\"true\">&#xB1;</mo></mrow></math>' role=\"presentation\" style=\"font-size: 90%; display: inline-block; position: relative;\" tabindex=\"0\"><svg aria-hidden=\"true\" focusable=\"false\" height=\"1.971ex\" role=\"img\" style=\"vertical-align: -0.235ex;\" viewbox=\"0 -747.2 778.5 848.5\" width=\"1.808ex\" xmlns:xlink=\"http://www.w3.org/1999/xlink\"><g fill=\"currentColor\" stroke=\"currentColor\" stroke-width=\"0\" transform=\"matrix(1 0 0 -1 0 0)\"><g is=\"true\"><g is=\"true\"><use xlink:href=\"#MJMAIN-B1\"></use></g></g></g></svg><span role=\"presentation\"><math xmlns=\"http://www.w3.org/1998/Math/MathML\"><mrow is=\"true\"><mo is=\"true\" linebreak=\"goodbreak\" linebreakstyle=\"after\">±</mo></mrow></math></span></span><script type=\"math/mml\"><math><mrow is=\"true\"><mo linebreak=\"goodbreak\" linebreakstyle=\"after\" is=\"true\">±</mo></mrow></math></script></span> 0.43 mm and single-axis errors below 2 mm. With a 2-kg load, it maintains less than 37 mm of deformation in all poses. Additionally, the TSM reduces contact pressure by 35.7% through active softening. These results highlight the manipulator’s strengths in motion stability, load-bearing capacity, and safety during human contact, showcasing its potential as a flexible limb for mobile or humanoid robots.</p>","PeriodicalId":9703,"journal":{"name":"Cell Reports Physical Science","volume":"43 1","pages":""},"PeriodicalIF":7.3000,"publicationDate":"2024-09-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Biomimetic tapered soft manipulator with precision and load-bearing capacity\",\"authors\":\"Xianglong Li, Shouyi Zhang, Quan Xiong, Dongbao Sui, Qinghua Zhang, Ziqi Wang, Lingkai Luan, Tianjiao Zheng, Jizhuang Fan, Jie Zhao, Yanhe Zhu\",\"doi\":\"10.1016/j.xcrp.2024.102210\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Designing a soft manipulator that effectively serves human applications presents significant challenges, especially in motion robustness and accuracy. The elephant trunk, with its flexibility, strong load-bearing capacity, and dexterous yet soft tip, provides an inspiring model. Inspired by the elephant trunk’s thrust-deformation mechanism under multi-muscle action, we present the design principles of a composite tendon and pneumatic hybrid-driven tapered soft manipulator (TSM). Simulation and testing show that the TSM achieves a repeatability accuracy of 0.69 <span><span style=\\\"\\\"></span><span data-mathml='<math xmlns=\\\"http://www.w3.org/1998/Math/MathML\\\"><mrow is=\\\"true\\\"><mo linebreak=\\\"goodbreak\\\" linebreakstyle=\\\"after\\\" is=\\\"true\\\">&#xB1;</mo></mrow></math>' role=\\\"presentation\\\" style=\\\"font-size: 90%; display: inline-block; position: relative;\\\" tabindex=\\\"0\\\"><svg aria-hidden=\\\"true\\\" focusable=\\\"false\\\" height=\\\"1.971ex\\\" role=\\\"img\\\" style=\\\"vertical-align: -0.235ex;\\\" viewbox=\\\"0 -747.2 778.5 848.5\\\" width=\\\"1.808ex\\\" xmlns:xlink=\\\"http://www.w3.org/1999/xlink\\\"><g fill=\\\"currentColor\\\" stroke=\\\"currentColor\\\" stroke-width=\\\"0\\\" transform=\\\"matrix(1 0 0 -1 0 0)\\\"><g is=\\\"true\\\"><g is=\\\"true\\\"><use xlink:href=\\\"#MJMAIN-B1\\\"></use></g></g></g></svg><span role=\\\"presentation\\\"><math xmlns=\\\"http://www.w3.org/1998/Math/MathML\\\"><mrow is=\\\"true\\\"><mo is=\\\"true\\\" linebreak=\\\"goodbreak\\\" linebreakstyle=\\\"after\\\">±</mo></mrow></math></span></span><script type=\\\"math/mml\\\"><math><mrow is=\\\"true\\\"><mo linebreak=\\\"goodbreak\\\" linebreakstyle=\\\"after\\\" is=\\\"true\\\">±</mo></mrow></math></script></span> 0.43 mm and single-axis errors below 2 mm. With a 2-kg load, it maintains less than 37 mm of deformation in all poses. Additionally, the TSM reduces contact pressure by 35.7% through active softening. These results highlight the manipulator’s strengths in motion stability, load-bearing capacity, and safety during human contact, showcasing its potential as a flexible limb for mobile or humanoid robots.</p>\",\"PeriodicalId\":9703,\"journal\":{\"name\":\"Cell Reports Physical Science\",\"volume\":\"43 1\",\"pages\":\"\"},\"PeriodicalIF\":7.3000,\"publicationDate\":\"2024-09-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cell Reports Physical Science\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1016/j.xcrp.2024.102210\",\"RegionNum\":2,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cell Reports Physical Science","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1016/j.xcrp.2024.102210","RegionNum":2,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
Biomimetic tapered soft manipulator with precision and load-bearing capacity
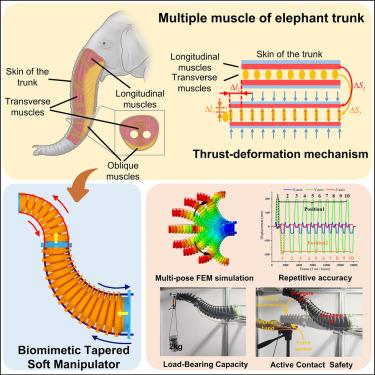
Designing a soft manipulator that effectively serves human applications presents significant challenges, especially in motion robustness and accuracy. The elephant trunk, with its flexibility, strong load-bearing capacity, and dexterous yet soft tip, provides an inspiring model. Inspired by the elephant trunk’s thrust-deformation mechanism under multi-muscle action, we present the design principles of a composite tendon and pneumatic hybrid-driven tapered soft manipulator (TSM). Simulation and testing show that the TSM achieves a repeatability accuracy of 0.69 0.43 mm and single-axis errors below 2 mm. With a 2-kg load, it maintains less than 37 mm of deformation in all poses. Additionally, the TSM reduces contact pressure by 35.7% through active softening. These results highlight the manipulator’s strengths in motion stability, load-bearing capacity, and safety during human contact, showcasing its potential as a flexible limb for mobile or humanoid robots.
期刊介绍:
Cell Reports Physical Science, a premium open-access journal from Cell Press, features high-quality, cutting-edge research spanning the physical sciences. It serves as an open forum fostering collaboration among physical scientists while championing open science principles. Published works must signify significant advancements in fundamental insight or technological applications within fields such as chemistry, physics, materials science, energy science, engineering, and related interdisciplinary studies. In addition to longer articles, the journal considers impactful short-form reports and short reviews covering recent literature in emerging fields. Continually adapting to the evolving open science landscape, the journal reviews its policies to align with community consensus and best practices.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
