Xumin Huang, Liwen Zhang, Jiangyu Hang, Thomas Quinn, Naufal Kabir Ahamed Nasar, Yiliang Lin, Chenyang Hu, Xuan Pang, Xuesi Chen, Thomas P. Davis, Ruirui Qiao
{"title":"利用可变形液态金属纳米粒子实现 4D 打印混合软机器人","authors":"Xumin Huang, Liwen Zhang, Jiangyu Hang, Thomas Quinn, Naufal Kabir Ahamed Nasar, Yiliang Lin, Chenyang Hu, Xuan Pang, Xuesi Chen, Thomas P. Davis, Ruirui Qiao","doi":"10.1002/adma.202409789","DOIUrl":null,"url":null,"abstract":"<p>In recent years, soft robotics has emerged as a rapidly expanding frontier research field that draws inspiration from the locomotion mechanisms of soft-bodied creatures in nature to achieve smooth and complex motion for diverse applications. However, the fabrication of soft robots with hybrid structures remains challenging due to limitations in material selection and the complex, multi-step processes involved in traditional manufacturing methods. Herein, a novel direct one-step additive manufacturing (3D printing) approach is introduced for the fabrication of hybrid robots composed of soft and rigid components for sophisticated tasks. Inspired by the shape-transformable liquid metal nanoparticles (LMNPs), a functional material toolkit with tuneable mechanical properties and deformability is developed by integrating differently shaped gallium-based nanoparticles (GNPs) into the 3D printing polymers. Then the direct printing of assembled or one-piece hybrid soft-rigid robots is presented through a single recipe of GNPs-integrated inks. This fabrication method enables precise control of the mechanical properties and shape memory properties within the hybrid structures of robot body with a customized structure design. Their capabilities are further demonstrated through the design and fabrication of hybrid robots as high-precision gripper, bioinspired motor, and hand rehabilitation device.</p>","PeriodicalId":114,"journal":{"name":"Advanced Materials","volume":"36 46","pages":""},"PeriodicalIF":26.8000,"publicationDate":"2024-09-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adma.202409789","citationCount":"0","resultStr":"{\"title\":\"4D Printing Hybrid Soft Robots Enabled by Shape-Transformable Liquid Metal Nanoparticles\",\"authors\":\"Xumin Huang, Liwen Zhang, Jiangyu Hang, Thomas Quinn, Naufal Kabir Ahamed Nasar, Yiliang Lin, Chenyang Hu, Xuan Pang, Xuesi Chen, Thomas P. Davis, Ruirui Qiao\",\"doi\":\"10.1002/adma.202409789\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In recent years, soft robotics has emerged as a rapidly expanding frontier research field that draws inspiration from the locomotion mechanisms of soft-bodied creatures in nature to achieve smooth and complex motion for diverse applications. However, the fabrication of soft robots with hybrid structures remains challenging due to limitations in material selection and the complex, multi-step processes involved in traditional manufacturing methods. Herein, a novel direct one-step additive manufacturing (3D printing) approach is introduced for the fabrication of hybrid robots composed of soft and rigid components for sophisticated tasks. Inspired by the shape-transformable liquid metal nanoparticles (LMNPs), a functional material toolkit with tuneable mechanical properties and deformability is developed by integrating differently shaped gallium-based nanoparticles (GNPs) into the 3D printing polymers. Then the direct printing of assembled or one-piece hybrid soft-rigid robots is presented through a single recipe of GNPs-integrated inks. This fabrication method enables precise control of the mechanical properties and shape memory properties within the hybrid structures of robot body with a customized structure design. Their capabilities are further demonstrated through the design and fabrication of hybrid robots as high-precision gripper, bioinspired motor, and hand rehabilitation device.</p>\",\"PeriodicalId\":114,\"journal\":{\"name\":\"Advanced Materials\",\"volume\":\"36 46\",\"pages\":\"\"},\"PeriodicalIF\":26.8000,\"publicationDate\":\"2024-09-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/adma.202409789\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Materials\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202409789\",\"RegionNum\":1,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Materials","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202409789","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, MULTIDISCIPLINARY","Score":null,"Total":0}
4D Printing Hybrid Soft Robots Enabled by Shape-Transformable Liquid Metal Nanoparticles
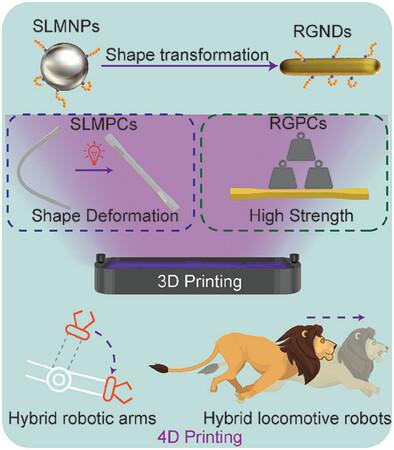
In recent years, soft robotics has emerged as a rapidly expanding frontier research field that draws inspiration from the locomotion mechanisms of soft-bodied creatures in nature to achieve smooth and complex motion for diverse applications. However, the fabrication of soft robots with hybrid structures remains challenging due to limitations in material selection and the complex, multi-step processes involved in traditional manufacturing methods. Herein, a novel direct one-step additive manufacturing (3D printing) approach is introduced for the fabrication of hybrid robots composed of soft and rigid components for sophisticated tasks. Inspired by the shape-transformable liquid metal nanoparticles (LMNPs), a functional material toolkit with tuneable mechanical properties and deformability is developed by integrating differently shaped gallium-based nanoparticles (GNPs) into the 3D printing polymers. Then the direct printing of assembled or one-piece hybrid soft-rigid robots is presented through a single recipe of GNPs-integrated inks. This fabrication method enables precise control of the mechanical properties and shape memory properties within the hybrid structures of robot body with a customized structure design. Their capabilities are further demonstrated through the design and fabrication of hybrid robots as high-precision gripper, bioinspired motor, and hand rehabilitation device.
期刊介绍:
Advanced Materials, one of the world's most prestigious journals and the foundation of the Advanced portfolio, is the home of choice for best-in-class materials science for more than 30 years. Following this fast-growing and interdisciplinary field, we are considering and publishing the most important discoveries on any and all materials from materials scientists, chemists, physicists, engineers as well as health and life scientists and bringing you the latest results and trends in modern materials-related research every week.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
