Weicheng Huang , Tianzhen Liu , Zhaowei Liu , Peifei Xu , Mingchao Liu , Yuzhen Chen , K. Jimmy Hsia
{"title":"基于离散微分几何的轴对称壳体非线性分析模型","authors":"Weicheng Huang , Tianzhen Liu , Zhaowei Liu , Peifei Xu , Mingchao Liu , Yuzhen Chen , K. Jimmy Hsia","doi":"10.1016/j.ijmecsci.2024.109742","DOIUrl":null,"url":null,"abstract":"<div><div>In this paper, we propose a novel one-dimensional (1D) discrete differential geometry (DDG)-based numerical method for geometrically nonlinear mechanics analysis (e.g., buckling and snapping) of axisymmetric shell structures. Our numerical model leverages differential geometry principles to accurately capture the complex nonlinear deformation patterns exhibited by axisymmetric shells. By discretizing the axisymmetric shell into interconnected 1D elements along the meridional direction, the in-plane stretching and out-of-bending potentials are formulated based on the geometric principles of 1D nodes and edges under the Kirchhoff–Love hypothesis, and elastic force vector and associated Hessian matrix required by equations of motion are later derived based on symbolic calculation. Through extensive validation with available theoretical solutions and finite element method (FEM) simulations in literature, our model demonstrates high accuracy in predicting the nonlinear behavior of axisymmetric shells. Importantly, compared to the classical theoretical model and three-dimensional (3D) FEM simulation, our model is highly computationally efficient, making it suitable for large-scale real-time simulations of nonlinear problems of shell structures such as instability and snap-through phenomena. Moreover, our framework can easily incorporate complex loading conditions, e.g., boundary nonlinear contact and multi-physics actuation, which play an essential role in the use of engineering applications, such as soft robots and flexible devices. This study demonstrates that the simplicity and effectiveness of the 1D discrete differential geometry-based approach render it a powerful tool for engineers and researchers interested in nonlinear mechanics analysis of axisymmetric shells, with potential applications in various engineering fields.</div></div>","PeriodicalId":56287,"journal":{"name":"International Journal of Mechanical Sciences","volume":"283 ","pages":"Article 109742"},"PeriodicalIF":7.1000,"publicationDate":"2024-09-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Discrete differential geometry-based model for nonlinear analysis of axisymmetric shells\",\"authors\":\"Weicheng Huang , Tianzhen Liu , Zhaowei Liu , Peifei Xu , Mingchao Liu , Yuzhen Chen , K. Jimmy Hsia\",\"doi\":\"10.1016/j.ijmecsci.2024.109742\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>In this paper, we propose a novel one-dimensional (1D) discrete differential geometry (DDG)-based numerical method for geometrically nonlinear mechanics analysis (e.g., buckling and snapping) of axisymmetric shell structures. Our numerical model leverages differential geometry principles to accurately capture the complex nonlinear deformation patterns exhibited by axisymmetric shells. By discretizing the axisymmetric shell into interconnected 1D elements along the meridional direction, the in-plane stretching and out-of-bending potentials are formulated based on the geometric principles of 1D nodes and edges under the Kirchhoff–Love hypothesis, and elastic force vector and associated Hessian matrix required by equations of motion are later derived based on symbolic calculation. Through extensive validation with available theoretical solutions and finite element method (FEM) simulations in literature, our model demonstrates high accuracy in predicting the nonlinear behavior of axisymmetric shells. Importantly, compared to the classical theoretical model and three-dimensional (3D) FEM simulation, our model is highly computationally efficient, making it suitable for large-scale real-time simulations of nonlinear problems of shell structures such as instability and snap-through phenomena. Moreover, our framework can easily incorporate complex loading conditions, e.g., boundary nonlinear contact and multi-physics actuation, which play an essential role in the use of engineering applications, such as soft robots and flexible devices. This study demonstrates that the simplicity and effectiveness of the 1D discrete differential geometry-based approach render it a powerful tool for engineers and researchers interested in nonlinear mechanics analysis of axisymmetric shells, with potential applications in various engineering fields.</div></div>\",\"PeriodicalId\":56287,\"journal\":{\"name\":\"International Journal of Mechanical Sciences\",\"volume\":\"283 \",\"pages\":\"Article 109742\"},\"PeriodicalIF\":7.1000,\"publicationDate\":\"2024-09-21\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Mechanical Sciences\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0020740324007835\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical Sciences","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0020740324007835","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
Discrete differential geometry-based model for nonlinear analysis of axisymmetric shells
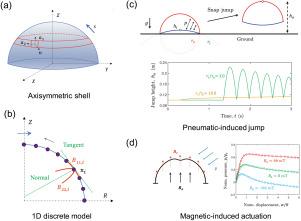
In this paper, we propose a novel one-dimensional (1D) discrete differential geometry (DDG)-based numerical method for geometrically nonlinear mechanics analysis (e.g., buckling and snapping) of axisymmetric shell structures. Our numerical model leverages differential geometry principles to accurately capture the complex nonlinear deformation patterns exhibited by axisymmetric shells. By discretizing the axisymmetric shell into interconnected 1D elements along the meridional direction, the in-plane stretching and out-of-bending potentials are formulated based on the geometric principles of 1D nodes and edges under the Kirchhoff–Love hypothesis, and elastic force vector and associated Hessian matrix required by equations of motion are later derived based on symbolic calculation. Through extensive validation with available theoretical solutions and finite element method (FEM) simulations in literature, our model demonstrates high accuracy in predicting the nonlinear behavior of axisymmetric shells. Importantly, compared to the classical theoretical model and three-dimensional (3D) FEM simulation, our model is highly computationally efficient, making it suitable for large-scale real-time simulations of nonlinear problems of shell structures such as instability and snap-through phenomena. Moreover, our framework can easily incorporate complex loading conditions, e.g., boundary nonlinear contact and multi-physics actuation, which play an essential role in the use of engineering applications, such as soft robots and flexible devices. This study demonstrates that the simplicity and effectiveness of the 1D discrete differential geometry-based approach render it a powerful tool for engineers and researchers interested in nonlinear mechanics analysis of axisymmetric shells, with potential applications in various engineering fields.
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
