Nelson E. Guevara , Carlos F. Rengifo , Yamir H. Bolaños , Daniel A. Fernández , Wilson A. Sierra , Luis E. Rodríguez
{"title":"设计用于估算人体步态过程中地面反作用力的低成本力垫","authors":"Nelson E. Guevara , Carlos F. Rengifo , Yamir H. Bolaños , Daniel A. Fernández , Wilson A. Sierra , Luis E. Rodríguez","doi":"10.1016/j.ohx.2024.e00589","DOIUrl":null,"url":null,"abstract":"<div><div>This paper proposes a low-cost electronic system for estimating ground reaction forces (GRF) during human gait. The device consists of one master node and two slave nodes. The master node sends instructions to slave nodes that sample and store data from two force insoles located at the participant’s feet. These insoles are equipped with 14 piezo-resistive FlexiForce A301 sensors (FSR). The slave nodes are attached to the ankles and feet of each participant. Subsequently, the start command is transmitted through the master node, which is connected to the USB port of a personal computer (PC). Once the walking session is completed, the information obtained by the slave nodes can be downloaded by accessing the access point generated by these devices through Wi-Fi communication. The GRF estimation system was validated with force platforms (<em>BTS Bioengineering P6000, Italy</em>), giving on average a <em>fit</em> measure equal to <span><math><mrow><mn>68</mn><mo>.</mo><mn>71</mn><mtext>%</mtext><mo>±</mo><mn>4</mn><mo>.</mo><mn>80</mn><mtext>%</mtext></mrow></math></span> in dynamic situations. Future versions of this device are expected to increase this <em>fit</em> by using machine learning models.</div></div>","PeriodicalId":37503,"journal":{"name":"HardwareX","volume":"20 ","pages":"Article e00589"},"PeriodicalIF":1.9000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Design of a low-cost force insoles to estimate ground reaction forces during human gait\",\"authors\":\"Nelson E. Guevara , Carlos F. Rengifo , Yamir H. Bolaños , Daniel A. Fernández , Wilson A. Sierra , Luis E. Rodríguez\",\"doi\":\"10.1016/j.ohx.2024.e00589\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>This paper proposes a low-cost electronic system for estimating ground reaction forces (GRF) during human gait. The device consists of one master node and two slave nodes. The master node sends instructions to slave nodes that sample and store data from two force insoles located at the participant’s feet. These insoles are equipped with 14 piezo-resistive FlexiForce A301 sensors (FSR). The slave nodes are attached to the ankles and feet of each participant. Subsequently, the start command is transmitted through the master node, which is connected to the USB port of a personal computer (PC). Once the walking session is completed, the information obtained by the slave nodes can be downloaded by accessing the access point generated by these devices through Wi-Fi communication. The GRF estimation system was validated with force platforms (<em>BTS Bioengineering P6000, Italy</em>), giving on average a <em>fit</em> measure equal to <span><math><mrow><mn>68</mn><mo>.</mo><mn>71</mn><mtext>%</mtext><mo>±</mo><mn>4</mn><mo>.</mo><mn>80</mn><mtext>%</mtext></mrow></math></span> in dynamic situations. Future versions of this device are expected to increase this <em>fit</em> by using machine learning models.</div></div>\",\"PeriodicalId\":37503,\"journal\":{\"name\":\"HardwareX\",\"volume\":\"20 \",\"pages\":\"Article e00589\"},\"PeriodicalIF\":1.9000,\"publicationDate\":\"2024-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"HardwareX\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S246806722400083X\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/9/27 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"HardwareX","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S246806722400083X","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/9/27 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Design of a low-cost force insoles to estimate ground reaction forces during human gait
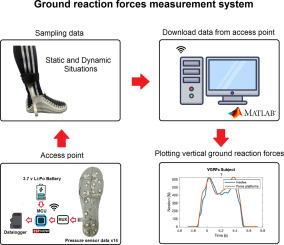
This paper proposes a low-cost electronic system for estimating ground reaction forces (GRF) during human gait. The device consists of one master node and two slave nodes. The master node sends instructions to slave nodes that sample and store data from two force insoles located at the participant’s feet. These insoles are equipped with 14 piezo-resistive FlexiForce A301 sensors (FSR). The slave nodes are attached to the ankles and feet of each participant. Subsequently, the start command is transmitted through the master node, which is connected to the USB port of a personal computer (PC). Once the walking session is completed, the information obtained by the slave nodes can be downloaded by accessing the access point generated by these devices through Wi-Fi communication. The GRF estimation system was validated with force platforms (BTS Bioengineering P6000, Italy), giving on average a fit measure equal to in dynamic situations. Future versions of this device are expected to increase this fit by using machine learning models.
HardwareXEngineering-Industrial and Manufacturing Engineering
CiteScore
4.10
自引率
18.20%
发文量
124
审稿时长
24 weeks
期刊介绍:
HardwareX is an open access journal established to promote free and open source designing, building and customizing of scientific infrastructure (hardware). HardwareX aims to recognize researchers for the time and effort in developing scientific infrastructure while providing end-users with sufficient information to replicate and validate the advances presented. HardwareX is open to input from all scientific, technological and medical disciplines. Scientific infrastructure will be interpreted in the broadest sense. Including hardware modifications to existing infrastructure, sensors and tools that perform measurements and other functions outside of the traditional lab setting (such as wearables, air/water quality sensors, and low cost alternatives to existing tools), and the creation of wholly new tools for either standard or novel laboratory tasks. Authors are encouraged to submit hardware developments that address all aspects of science, not only the final measurement, for example, enhancements in sample preparation and handling, user safety, and quality control. The use of distributed digital manufacturing strategies (e.g. 3-D printing) is encouraged. All designs must be submitted under an open hardware license.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
