Minghui Yin , Yusen Guo , Jing An , TieZhu Liu , Guangyang Gou , Tong Li , Gang Chen , Tianjun Ma , Jianhai Sun , Mengdi Han , Jianqun Cheng , Jun Zhou , Xuan Sun , Chengyu Zhuang , Haiting Li , Chunxiu Liu , Zhimei Qi , Ning Xue
{"title":"用于机器人抓取反馈的灵活、宽范围、灵敏的三轴压力传感器阵列","authors":"Minghui Yin , Yusen Guo , Jing An , TieZhu Liu , Guangyang Gou , Tong Li , Gang Chen , Tianjun Ma , Jianhai Sun , Mengdi Han , Jianqun Cheng , Jun Zhou , Xuan Sun , Chengyu Zhuang , Haiting Li , Chunxiu Liu , Zhimei Qi , Ning Xue","doi":"10.1016/j.snr.2024.100250","DOIUrl":null,"url":null,"abstract":"<div><div>Flexible pressure sensors capable of detecting normal and tangential forces through physical contact have garnered considerable interest in the realm of human-interactive systems. However, simultaneous detection of multi-directional forces is still a challenge for current research. Herein, a capacitive flexible pressure sensor based on a sandwich structure for three-dimensional force detection is proposed. The fabrication process of the sensor array is straightforward, capable of effectively distinguishing between normal and tangential forces. Polyimide (PI) serves as the flexible substrate for depositing the metal electrode pattern, while Polydimethylsiloxane (PDMS) acts as the intermediate dielectric layer material and the three-dimensional force conduction block. Through a comparative study of the thickness of the hollow dielectric layer, a pressure sensor with superior performance was prepared, featuring high sensitivity across a wide working range. Test results demonstrate its capability to detect normal forces ranging from 0 to 46 N (0–520 kPa) with a sensitivity of 0.442 N<sup>−1</sup> (0.031 kPa<sup>−1</sup>) and tangential forces from 0 to 10 N with a sensitivity of 0.08 N<sup>−1</sup> (X-axis) and 0.07 N<sup>−1</sup> (Y-axis). The designed acquisition system can simultaneously gather data from 6 sensor arrays, totaling 240 channels, with a response time of 11 ms. This sensor array, characterized by flexibility, versatility, and a wide range, is suitable for applications in robot tactile perception.</div></div>","PeriodicalId":426,"journal":{"name":"Sensors and Actuators Reports","volume":"8 ","pages":"Article 100250"},"PeriodicalIF":7.6000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Flexible wide-range, sensitive three-axis pressure sensor array for robotic grasping feedback\",\"authors\":\"Minghui Yin , Yusen Guo , Jing An , TieZhu Liu , Guangyang Gou , Tong Li , Gang Chen , Tianjun Ma , Jianhai Sun , Mengdi Han , Jianqun Cheng , Jun Zhou , Xuan Sun , Chengyu Zhuang , Haiting Li , Chunxiu Liu , Zhimei Qi , Ning Xue\",\"doi\":\"10.1016/j.snr.2024.100250\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>Flexible pressure sensors capable of detecting normal and tangential forces through physical contact have garnered considerable interest in the realm of human-interactive systems. However, simultaneous detection of multi-directional forces is still a challenge for current research. Herein, a capacitive flexible pressure sensor based on a sandwich structure for three-dimensional force detection is proposed. The fabrication process of the sensor array is straightforward, capable of effectively distinguishing between normal and tangential forces. Polyimide (PI) serves as the flexible substrate for depositing the metal electrode pattern, while Polydimethylsiloxane (PDMS) acts as the intermediate dielectric layer material and the three-dimensional force conduction block. Through a comparative study of the thickness of the hollow dielectric layer, a pressure sensor with superior performance was prepared, featuring high sensitivity across a wide working range. Test results demonstrate its capability to detect normal forces ranging from 0 to 46 N (0–520 kPa) with a sensitivity of 0.442 N<sup>−1</sup> (0.031 kPa<sup>−1</sup>) and tangential forces from 0 to 10 N with a sensitivity of 0.08 N<sup>−1</sup> (X-axis) and 0.07 N<sup>−1</sup> (Y-axis). The designed acquisition system can simultaneously gather data from 6 sensor arrays, totaling 240 channels, with a response time of 11 ms. This sensor array, characterized by flexibility, versatility, and a wide range, is suitable for applications in robot tactile perception.</div></div>\",\"PeriodicalId\":426,\"journal\":{\"name\":\"Sensors and Actuators Reports\",\"volume\":\"8 \",\"pages\":\"Article 100250\"},\"PeriodicalIF\":7.6000,\"publicationDate\":\"2024-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Sensors and Actuators Reports\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2666053924000663\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/10/10 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"BIOTECHNOLOGY & APPLIED MICROBIOLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Sensors and Actuators Reports","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2666053924000663","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/10/10 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"BIOTECHNOLOGY & APPLIED MICROBIOLOGY","Score":null,"Total":0}
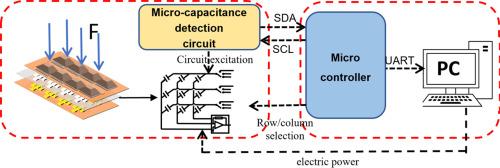
Flexible pressure sensors capable of detecting normal and tangential forces through physical contact have garnered considerable interest in the realm of human-interactive systems. However, simultaneous detection of multi-directional forces is still a challenge for current research. Herein, a capacitive flexible pressure sensor based on a sandwich structure for three-dimensional force detection is proposed. The fabrication process of the sensor array is straightforward, capable of effectively distinguishing between normal and tangential forces. Polyimide (PI) serves as the flexible substrate for depositing the metal electrode pattern, while Polydimethylsiloxane (PDMS) acts as the intermediate dielectric layer material and the three-dimensional force conduction block. Through a comparative study of the thickness of the hollow dielectric layer, a pressure sensor with superior performance was prepared, featuring high sensitivity across a wide working range. Test results demonstrate its capability to detect normal forces ranging from 0 to 46 N (0–520 kPa) with a sensitivity of 0.442 N−1 (0.031 kPa−1) and tangential forces from 0 to 10 N with a sensitivity of 0.08 N−1 (X-axis) and 0.07 N−1 (Y-axis). The designed acquisition system can simultaneously gather data from 6 sensor arrays, totaling 240 channels, with a response time of 11 ms. This sensor array, characterized by flexibility, versatility, and a wide range, is suitable for applications in robot tactile perception.
期刊介绍:
Sensors and Actuators Reports is a peer-reviewed open access journal launched out from the Sensors and Actuators journal family. Sensors and Actuators Reports is dedicated to publishing new and original works in the field of all type of sensors and actuators, including bio-, chemical-, physical-, and nano- sensors and actuators, which demonstrates significant progress beyond the current state of the art. The journal regularly publishes original research papers, reviews, and short communications.
For research papers and short communications, the journal aims to publish the new and original work supported by experimental results and as such purely theoretical works are not accepted.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
