Tianwei Dai, Sriram Vijayakrishnan, Filip T. Szczypiński, Jean-François Ayme, Ehsan Simaei, Thomas Fellowes, Rob Clowes, Lyubomir Kotopanov, Caitlin E. Shields, Zhengxue Zhou, John W. Ward, Andrew I. Cooper
{"title":"用于探索性合成化学的自主移动机器人","authors":"Tianwei Dai, Sriram Vijayakrishnan, Filip T. Szczypiński, Jean-François Ayme, Ehsan Simaei, Thomas Fellowes, Rob Clowes, Lyubomir Kotopanov, Caitlin E. Shields, Zhengxue Zhou, John W. Ward, Andrew I. Cooper","doi":"10.1038/s41586-024-08173-7","DOIUrl":null,"url":null,"abstract":"Autonomous laboratories can accelerate discoveries in chemical synthesis, but this requires automated measurements coupled with reliable decision-making1,2. Most autonomous laboratories involve bespoke automated equipment3–6, and reaction outcomes are often assessed using a single, hard-wired characterization technique7. Any decision-making algorithms8 must then operate using this narrow range of characterization data9,10. By contrast, manual experiments tend to draw on a wider range of instruments to characterize reaction products, and decisions are rarely taken based on one measurement alone. Here we show that a synthesis laboratory can be integrated into an autonomous laboratory by using mobile robots11–13 that operate equipment and make decisions in a human-like way. Our modular workflow combines mobile robots, an automated synthesis platform, a liquid chromatography–mass spectrometer and a benchtop nuclear magnetic resonance spectrometer. This allows robots to share existing laboratory equipment with human researchers without monopolizing it or requiring extensive redesign. A heuristic decision-maker processes the orthogonal measurement data, selecting successful reactions to take forward and automatically checking the reproducibility of any screening hits. We exemplify this approach in the three areas of structural diversification chemistry, supramolecular host–guest chemistry and photochemical synthesis. This strategy is particularly suited to exploratory chemistry that can yield multiple potential products, as for supramolecular assemblies, where we also extend the method to an autonomous function assay by evaluating host–guest binding properties. A modular autonomous platform for general exploratory synthetic chemistry uses mobile robots to integrate an automated synthesis platform and two analysis platforms.","PeriodicalId":18787,"journal":{"name":"Nature","volume":"635 8040","pages":"890-897"},"PeriodicalIF":48.5000,"publicationDate":"2024-11-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s41586-024-08173-7.pdf","citationCount":"0","resultStr":"{\"title\":\"Autonomous mobile robots for exploratory synthetic chemistry\",\"authors\":\"Tianwei Dai, Sriram Vijayakrishnan, Filip T. Szczypiński, Jean-François Ayme, Ehsan Simaei, Thomas Fellowes, Rob Clowes, Lyubomir Kotopanov, Caitlin E. Shields, Zhengxue Zhou, John W. Ward, Andrew I. Cooper\",\"doi\":\"10.1038/s41586-024-08173-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Autonomous laboratories can accelerate discoveries in chemical synthesis, but this requires automated measurements coupled with reliable decision-making1,2. Most autonomous laboratories involve bespoke automated equipment3–6, and reaction outcomes are often assessed using a single, hard-wired characterization technique7. Any decision-making algorithms8 must then operate using this narrow range of characterization data9,10. By contrast, manual experiments tend to draw on a wider range of instruments to characterize reaction products, and decisions are rarely taken based on one measurement alone. Here we show that a synthesis laboratory can be integrated into an autonomous laboratory by using mobile robots11–13 that operate equipment and make decisions in a human-like way. Our modular workflow combines mobile robots, an automated synthesis platform, a liquid chromatography–mass spectrometer and a benchtop nuclear magnetic resonance spectrometer. This allows robots to share existing laboratory equipment with human researchers without monopolizing it or requiring extensive redesign. A heuristic decision-maker processes the orthogonal measurement data, selecting successful reactions to take forward and automatically checking the reproducibility of any screening hits. We exemplify this approach in the three areas of structural diversification chemistry, supramolecular host–guest chemistry and photochemical synthesis. This strategy is particularly suited to exploratory chemistry that can yield multiple potential products, as for supramolecular assemblies, where we also extend the method to an autonomous function assay by evaluating host–guest binding properties. A modular autonomous platform for general exploratory synthetic chemistry uses mobile robots to integrate an automated synthesis platform and two analysis platforms.\",\"PeriodicalId\":18787,\"journal\":{\"name\":\"Nature\",\"volume\":\"635 8040\",\"pages\":\"890-897\"},\"PeriodicalIF\":48.5000,\"publicationDate\":\"2024-11-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.nature.com/articles/s41586-024-08173-7.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://www.nature.com/articles/s41586-024-08173-7\",\"RegionNum\":1,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature","FirstCategoryId":"103","ListUrlMain":"https://www.nature.com/articles/s41586-024-08173-7","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
Autonomous mobile robots for exploratory synthetic chemistry
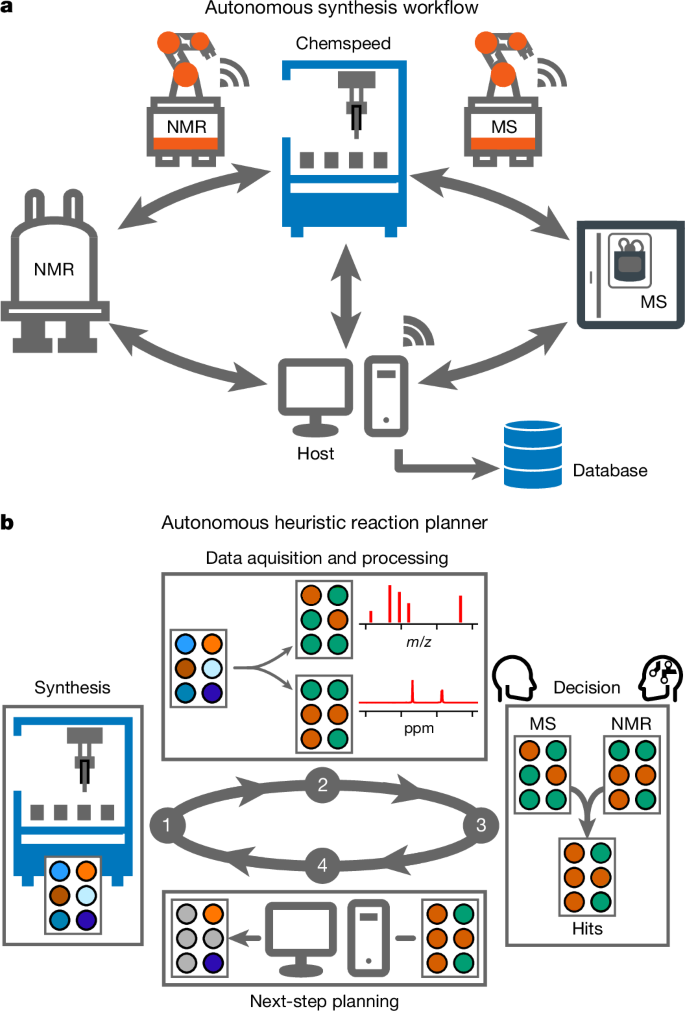
Autonomous laboratories can accelerate discoveries in chemical synthesis, but this requires automated measurements coupled with reliable decision-making1,2. Most autonomous laboratories involve bespoke automated equipment3–6, and reaction outcomes are often assessed using a single, hard-wired characterization technique7. Any decision-making algorithms8 must then operate using this narrow range of characterization data9,10. By contrast, manual experiments tend to draw on a wider range of instruments to characterize reaction products, and decisions are rarely taken based on one measurement alone. Here we show that a synthesis laboratory can be integrated into an autonomous laboratory by using mobile robots11–13 that operate equipment and make decisions in a human-like way. Our modular workflow combines mobile robots, an automated synthesis platform, a liquid chromatography–mass spectrometer and a benchtop nuclear magnetic resonance spectrometer. This allows robots to share existing laboratory equipment with human researchers without monopolizing it or requiring extensive redesign. A heuristic decision-maker processes the orthogonal measurement data, selecting successful reactions to take forward and automatically checking the reproducibility of any screening hits. We exemplify this approach in the three areas of structural diversification chemistry, supramolecular host–guest chemistry and photochemical synthesis. This strategy is particularly suited to exploratory chemistry that can yield multiple potential products, as for supramolecular assemblies, where we also extend the method to an autonomous function assay by evaluating host–guest binding properties. A modular autonomous platform for general exploratory synthetic chemistry uses mobile robots to integrate an automated synthesis platform and two analysis platforms.
期刊介绍:
Nature is a prestigious international journal that publishes peer-reviewed research in various scientific and technological fields. The selection of articles is based on criteria such as originality, importance, interdisciplinary relevance, timeliness, accessibility, elegance, and surprising conclusions. In addition to showcasing significant scientific advances, Nature delivers rapid, authoritative, insightful news, and interpretation of current and upcoming trends impacting science, scientists, and the broader public. The journal serves a dual purpose: firstly, to promptly share noteworthy scientific advances and foster discussions among scientists, and secondly, to ensure the swift dissemination of scientific results globally, emphasizing their significance for knowledge, culture, and daily life.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
