Tyler Parsons , Fattah Hanafi Sheikhha , Jaho Seo , Hanmin Lee
{"title":"RGB-LiDAR 传感器融合用于自主挖掘应用中的粉尘去滤波","authors":"Tyler Parsons , Fattah Hanafi Sheikhha , Jaho Seo , Hanmin Lee","doi":"10.1016/j.autcon.2024.105850","DOIUrl":null,"url":null,"abstract":"<div><div>The dusty environments of autonomous excavation can affect the performance of the sensors onboard the vehicle. Specifically, airborne dust clouds can be perceived as solid objects if not addressed appropriately, which can lead to irrational movements that risk safety. In this article, a light detection and ranging (LiDAR) and red-green-blue (RGB) image sensor fusion model was developed to filter airborne dust particles. The proposed approach processes the RGB and LiDAR data in separate convolutional neural network (CNN) models and combines the predictions in a late fusion model for enhanced real-time performance. Testing shows that the proposed fusion model has an F1 score at least 2.64% higher than a LiDAR only CNN model and a dynamic radius outlier removal paired with low-intensity outlier removal (LIOR-DROR) when dust clouds are around 3 m from the sensors.</div></div>","PeriodicalId":8660,"journal":{"name":"Automation in Construction","volume":"168 ","pages":"Article 105850"},"PeriodicalIF":9.6000,"publicationDate":"2024-11-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"RGB-LiDAR sensor fusion for dust de-filtering in autonomous excavation applications\",\"authors\":\"Tyler Parsons , Fattah Hanafi Sheikhha , Jaho Seo , Hanmin Lee\",\"doi\":\"10.1016/j.autcon.2024.105850\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>The dusty environments of autonomous excavation can affect the performance of the sensors onboard the vehicle. Specifically, airborne dust clouds can be perceived as solid objects if not addressed appropriately, which can lead to irrational movements that risk safety. In this article, a light detection and ranging (LiDAR) and red-green-blue (RGB) image sensor fusion model was developed to filter airborne dust particles. The proposed approach processes the RGB and LiDAR data in separate convolutional neural network (CNN) models and combines the predictions in a late fusion model for enhanced real-time performance. Testing shows that the proposed fusion model has an F1 score at least 2.64% higher than a LiDAR only CNN model and a dynamic radius outlier removal paired with low-intensity outlier removal (LIOR-DROR) when dust clouds are around 3 m from the sensors.</div></div>\",\"PeriodicalId\":8660,\"journal\":{\"name\":\"Automation in Construction\",\"volume\":\"168 \",\"pages\":\"Article 105850\"},\"PeriodicalIF\":9.6000,\"publicationDate\":\"2024-11-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Automation in Construction\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0926580524005867\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CONSTRUCTION & BUILDING TECHNOLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Automation in Construction","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0926580524005867","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CONSTRUCTION & BUILDING TECHNOLOGY","Score":null,"Total":0}
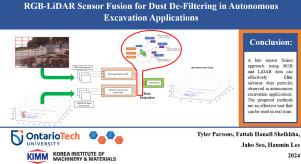
RGB-LiDAR sensor fusion for dust de-filtering in autonomous excavation applications
The dusty environments of autonomous excavation can affect the performance of the sensors onboard the vehicle. Specifically, airborne dust clouds can be perceived as solid objects if not addressed appropriately, which can lead to irrational movements that risk safety. In this article, a light detection and ranging (LiDAR) and red-green-blue (RGB) image sensor fusion model was developed to filter airborne dust particles. The proposed approach processes the RGB and LiDAR data in separate convolutional neural network (CNN) models and combines the predictions in a late fusion model for enhanced real-time performance. Testing shows that the proposed fusion model has an F1 score at least 2.64% higher than a LiDAR only CNN model and a dynamic radius outlier removal paired with low-intensity outlier removal (LIOR-DROR) when dust clouds are around 3 m from the sensors.
期刊介绍:
Automation in Construction is an international journal that focuses on publishing original research papers related to the use of Information Technologies in various aspects of the construction industry. The journal covers topics such as design, engineering, construction technologies, and the maintenance and management of constructed facilities.
The scope of Automation in Construction is extensive and covers all stages of the construction life cycle. This includes initial planning and design, construction of the facility, operation and maintenance, as well as the eventual dismantling and recycling of buildings and engineering structures.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
