{"title":"物流机器人的路径规划策略:集成增强型 A-star 算法和 DWA","authors":"Xianyang Zeng, Jiawang Zhang, Wenhui Yin, Hongli Yang, Hao Yu, Yuansheng Liang, Jinwu Tong","doi":"10.1049/ell2.70090","DOIUrl":null,"url":null,"abstract":"<p>Path planning is the key part in the process of transportation conducted by logistics robots, and there often exist some problems with it. The path designed is not always smooth enough and its search efficiency is low, for example. As a common global path planning algorithm, A-star is based on the traditional algorithm, which is unable to solve the problem of uneven path in the movement of logistics robots. Through improving the heuristic function of the traditional A-star algorithm, weighing the heuristic function dynamically, removing the redundant points of the traditional star algorithm path with Floyd algorithm, and setting a safe distance to prevent the logistics robot from collision at the same time, the path is finally curved to be more appropriate to the movement path of the logistics robot. The MATLAB simulation of A-star algorithm before and after the improvement shows that the turning points of the advanced A-star algorithm reduced 61.5% on average compared to the traditional algorithm. The path length decreased 2.4% and the traversing points reduced 58.5%. At the same time, the DWA algorithm introduces dynamic weight coefficients, which can dynamically adjust the weight coefficients when encountering obstacles, so as to safely reach the target point.</p>","PeriodicalId":11556,"journal":{"name":"Electronics Letters","volume":"60 22","pages":""},"PeriodicalIF":0.8000,"publicationDate":"2024-11-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/ell2.70090","citationCount":"0","resultStr":"{\"title\":\"Path planning strategies for logistics robots: Integrating enhanced A-star algorithm and DWA\",\"authors\":\"Xianyang Zeng, Jiawang Zhang, Wenhui Yin, Hongli Yang, Hao Yu, Yuansheng Liang, Jinwu Tong\",\"doi\":\"10.1049/ell2.70090\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Path planning is the key part in the process of transportation conducted by logistics robots, and there often exist some problems with it. The path designed is not always smooth enough and its search efficiency is low, for example. As a common global path planning algorithm, A-star is based on the traditional algorithm, which is unable to solve the problem of uneven path in the movement of logistics robots. Through improving the heuristic function of the traditional A-star algorithm, weighing the heuristic function dynamically, removing the redundant points of the traditional star algorithm path with Floyd algorithm, and setting a safe distance to prevent the logistics robot from collision at the same time, the path is finally curved to be more appropriate to the movement path of the logistics robot. The MATLAB simulation of A-star algorithm before and after the improvement shows that the turning points of the advanced A-star algorithm reduced 61.5% on average compared to the traditional algorithm. The path length decreased 2.4% and the traversing points reduced 58.5%. At the same time, the DWA algorithm introduces dynamic weight coefficients, which can dynamically adjust the weight coefficients when encountering obstacles, so as to safely reach the target point.</p>\",\"PeriodicalId\":11556,\"journal\":{\"name\":\"Electronics Letters\",\"volume\":\"60 22\",\"pages\":\"\"},\"PeriodicalIF\":0.8000,\"publicationDate\":\"2024-11-12\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/ell2.70090\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Electronics Letters\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/ell2.70090\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Electronics Letters","FirstCategoryId":"5","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/ell2.70090","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Path planning strategies for logistics robots: Integrating enhanced A-star algorithm and DWA
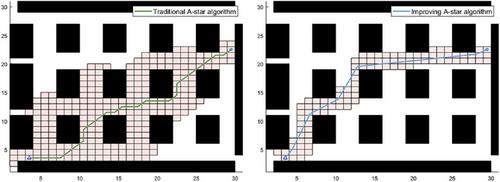
Path planning is the key part in the process of transportation conducted by logistics robots, and there often exist some problems with it. The path designed is not always smooth enough and its search efficiency is low, for example. As a common global path planning algorithm, A-star is based on the traditional algorithm, which is unable to solve the problem of uneven path in the movement of logistics robots. Through improving the heuristic function of the traditional A-star algorithm, weighing the heuristic function dynamically, removing the redundant points of the traditional star algorithm path with Floyd algorithm, and setting a safe distance to prevent the logistics robot from collision at the same time, the path is finally curved to be more appropriate to the movement path of the logistics robot. The MATLAB simulation of A-star algorithm before and after the improvement shows that the turning points of the advanced A-star algorithm reduced 61.5% on average compared to the traditional algorithm. The path length decreased 2.4% and the traversing points reduced 58.5%. At the same time, the DWA algorithm introduces dynamic weight coefficients, which can dynamically adjust the weight coefficients when encountering obstacles, so as to safely reach the target point.
期刊介绍:
Electronics Letters is an internationally renowned peer-reviewed rapid-communication journal that publishes short original research papers every two weeks. Its broad and interdisciplinary scope covers the latest developments in all electronic engineering related fields including communication, biomedical, optical and device technologies. Electronics Letters also provides further insight into some of the latest developments through special features and interviews.
Scope
As a journal at the forefront of its field, Electronics Letters publishes papers covering all themes of electronic and electrical engineering. The major themes of the journal are listed below.
Antennas and Propagation
Biomedical and Bioinspired Technologies, Signal Processing and Applications
Control Engineering
Electromagnetism: Theory, Materials and Devices
Electronic Circuits and Systems
Image, Video and Vision Processing and Applications
Information, Computing and Communications
Instrumentation and Measurement
Microwave Technology
Optical Communications
Photonics and Opto-Electronics
Power Electronics, Energy and Sustainability
Radar, Sonar and Navigation
Semiconductor Technology
Signal Processing
MIMO





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
