{"title":"简单传感器中的三轴力自解耦功能","authors":"Kuanming Yao, Qiuna Zhuang","doi":"10.1038/s42256-024-00941-4","DOIUrl":null,"url":null,"abstract":"A self-decoupling tactile sensor dramatically reduces calibration time for three-dimensional force measurement, scaling from cubic (N³) to linear (3N). This advancement facilitates robotic tactile perception in human–machine interfaces.","PeriodicalId":48533,"journal":{"name":"Nature Machine Intelligence","volume":"6 12","pages":"1431-1432"},"PeriodicalIF":29.8000,"publicationDate":"2024-11-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Self-decoupling three-axis forces in a simple sensor\",\"authors\":\"Kuanming Yao, Qiuna Zhuang\",\"doi\":\"10.1038/s42256-024-00941-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"A self-decoupling tactile sensor dramatically reduces calibration time for three-dimensional force measurement, scaling from cubic (N³) to linear (3N). This advancement facilitates robotic tactile perception in human–machine interfaces.\",\"PeriodicalId\":48533,\"journal\":{\"name\":\"Nature Machine Intelligence\",\"volume\":\"6 12\",\"pages\":\"1431-1432\"},\"PeriodicalIF\":29.8000,\"publicationDate\":\"2024-11-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature Machine Intelligence\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.nature.com/articles/s42256-024-00941-4\",\"RegionNum\":1,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Machine Intelligence","FirstCategoryId":"94","ListUrlMain":"https://www.nature.com/articles/s42256-024-00941-4","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Self-decoupling three-axis forces in a simple sensor
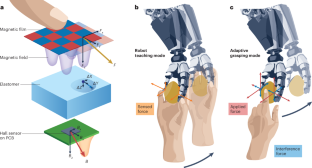
A self-decoupling tactile sensor dramatically reduces calibration time for three-dimensional force measurement, scaling from cubic (N³) to linear (3N). This advancement facilitates robotic tactile perception in human–machine interfaces.
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
