Junyeong Lee , Jinuk Kwon , Joowon Park , Gyumin Kim , Hyeondo Kim , Sukho Park
{"title":"大量程扭弦执行器的训练技术和增强的运动学建模","authors":"Junyeong Lee , Jinuk Kwon , Joowon Park , Gyumin Kim , Hyeondo Kim , Sukho Park","doi":"10.1016/j.measurement.2024.116286","DOIUrl":null,"url":null,"abstract":"<div><div>As a linear actuator, the twisted string actuator (TSA) offers ease of miniaturization, flexibility, and the capability to exert a strong actuation force, due to its large gear ratio. Owing to these characteristics, TSA has recently gained attention as a suitable small actuator for wearable devices, and surgical robots. However, the operating range relative to its size has been reported as limited. This study aims to overcome this limitation by extending the operating range of TSA using the coiling phase, following the twisting phase. To achieve this, we first analyze the training process to effectively mitigate the irregular overlapping phenomena in the coiling stage of TSA, considering the hysteresis and the training effect of TSA under different loads. Second, we address the limitations of conventional TSA kinematic models and propose an improved kinematic model for the extended operating range of TSA. Specifically, this study presents the precise transition points between the twisting and coiling phases of TSA and proposes enhanced analytical models for each phase. Finally, through various experiments, we validate the proposed training process and kinematic model for extended TSA operation. It is expected that the proposed training process and kinematic model for TSA will enable precise actuation within the extended operating range, facilitating a wider array of applications.</div></div>","PeriodicalId":18349,"journal":{"name":"Measurement","volume":"243 ","pages":"Article 116286"},"PeriodicalIF":5.2000,"publicationDate":"2024-11-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Training techniques and enhanced kinematic modeling for extended range twisted string actuators\",\"authors\":\"Junyeong Lee , Jinuk Kwon , Joowon Park , Gyumin Kim , Hyeondo Kim , Sukho Park\",\"doi\":\"10.1016/j.measurement.2024.116286\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>As a linear actuator, the twisted string actuator (TSA) offers ease of miniaturization, flexibility, and the capability to exert a strong actuation force, due to its large gear ratio. Owing to these characteristics, TSA has recently gained attention as a suitable small actuator for wearable devices, and surgical robots. However, the operating range relative to its size has been reported as limited. This study aims to overcome this limitation by extending the operating range of TSA using the coiling phase, following the twisting phase. To achieve this, we first analyze the training process to effectively mitigate the irregular overlapping phenomena in the coiling stage of TSA, considering the hysteresis and the training effect of TSA under different loads. Second, we address the limitations of conventional TSA kinematic models and propose an improved kinematic model for the extended operating range of TSA. Specifically, this study presents the precise transition points between the twisting and coiling phases of TSA and proposes enhanced analytical models for each phase. Finally, through various experiments, we validate the proposed training process and kinematic model for extended TSA operation. It is expected that the proposed training process and kinematic model for TSA will enable precise actuation within the extended operating range, facilitating a wider array of applications.</div></div>\",\"PeriodicalId\":18349,\"journal\":{\"name\":\"Measurement\",\"volume\":\"243 \",\"pages\":\"Article 116286\"},\"PeriodicalIF\":5.2000,\"publicationDate\":\"2024-11-24\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Measurement\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0263224124021717\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Measurement","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0263224124021717","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
Training techniques and enhanced kinematic modeling for extended range twisted string actuators
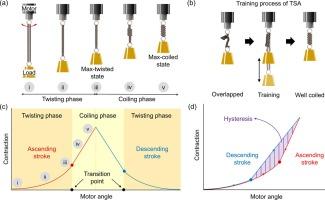
As a linear actuator, the twisted string actuator (TSA) offers ease of miniaturization, flexibility, and the capability to exert a strong actuation force, due to its large gear ratio. Owing to these characteristics, TSA has recently gained attention as a suitable small actuator for wearable devices, and surgical robots. However, the operating range relative to its size has been reported as limited. This study aims to overcome this limitation by extending the operating range of TSA using the coiling phase, following the twisting phase. To achieve this, we first analyze the training process to effectively mitigate the irregular overlapping phenomena in the coiling stage of TSA, considering the hysteresis and the training effect of TSA under different loads. Second, we address the limitations of conventional TSA kinematic models and propose an improved kinematic model for the extended operating range of TSA. Specifically, this study presents the precise transition points between the twisting and coiling phases of TSA and proposes enhanced analytical models for each phase. Finally, through various experiments, we validate the proposed training process and kinematic model for extended TSA operation. It is expected that the proposed training process and kinematic model for TSA will enable precise actuation within the extended operating range, facilitating a wider array of applications.
期刊介绍:
Contributions are invited on novel achievements in all fields of measurement and instrumentation science and technology. Authors are encouraged to submit novel material, whose ultimate goal is an advancement in the state of the art of: measurement and metrology fundamentals, sensors, measurement instruments, measurement and estimation techniques, measurement data processing and fusion algorithms, evaluation procedures and methodologies for plants and industrial processes, performance analysis of systems, processes and algorithms, mathematical models for measurement-oriented purposes, distributed measurement systems in a connected world.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
