{"title":"平面和螺旋型运动链空间机构的结构综合与分析","authors":"A. S. Fomin, A. V. Antonov","doi":"10.1134/S1052618824700341","DOIUrl":null,"url":null,"abstract":"<p>The article discusses the problem of structural synthesis of mechanisms designed from planar- and screw-type kinematic chains. Using the example of the simplest zero-mobility groups — planar dyads (two-bar groups) and screw monads (one-bar groups) — we demonstrated a synthesis algorithm, which consists of setting these groups between two links, combining them into a closed kinematic chain. When we fix any of the links in such a chain, we obtain a workable mechanism. This algorithm considers two possible options for the relative arrangement of planar- and screw-type kinematic chains. Based on the developed algorithm, we synthesized a family of five-bar planar-screw one-DOF mechanisms. We confirmed the competence of the presented algorithm by performing a mobility analysis of one of the synthesized mechanisms.</p>","PeriodicalId":642,"journal":{"name":"Journal of Machinery Manufacture and Reliability","volume":"53 7","pages":"686 - 692"},"PeriodicalIF":0.4000,"publicationDate":"2024-12-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Structural Synthesis and Analysis of Spatial Mechanisms Designed from Planar- and Screw-Type Kinematic Chains\",\"authors\":\"A. S. Fomin, A. V. Antonov\",\"doi\":\"10.1134/S1052618824700341\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The article discusses the problem of structural synthesis of mechanisms designed from planar- and screw-type kinematic chains. Using the example of the simplest zero-mobility groups — planar dyads (two-bar groups) and screw monads (one-bar groups) — we demonstrated a synthesis algorithm, which consists of setting these groups between two links, combining them into a closed kinematic chain. When we fix any of the links in such a chain, we obtain a workable mechanism. This algorithm considers two possible options for the relative arrangement of planar- and screw-type kinematic chains. Based on the developed algorithm, we synthesized a family of five-bar planar-screw one-DOF mechanisms. We confirmed the competence of the presented algorithm by performing a mobility analysis of one of the synthesized mechanisms.</p>\",\"PeriodicalId\":642,\"journal\":{\"name\":\"Journal of Machinery Manufacture and Reliability\",\"volume\":\"53 7\",\"pages\":\"686 - 692\"},\"PeriodicalIF\":0.4000,\"publicationDate\":\"2024-12-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Machinery Manufacture and Reliability\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1134/S1052618824700341\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Machinery Manufacture and Reliability","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1134/S1052618824700341","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
Structural Synthesis and Analysis of Spatial Mechanisms Designed from Planar- and Screw-Type Kinematic Chains
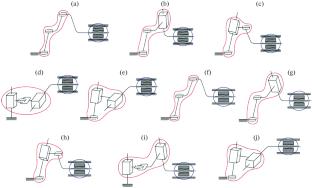
The article discusses the problem of structural synthesis of mechanisms designed from planar- and screw-type kinematic chains. Using the example of the simplest zero-mobility groups — planar dyads (two-bar groups) and screw monads (one-bar groups) — we demonstrated a synthesis algorithm, which consists of setting these groups between two links, combining them into a closed kinematic chain. When we fix any of the links in such a chain, we obtain a workable mechanism. This algorithm considers two possible options for the relative arrangement of planar- and screw-type kinematic chains. Based on the developed algorithm, we synthesized a family of five-bar planar-screw one-DOF mechanisms. We confirmed the competence of the presented algorithm by performing a mobility analysis of one of the synthesized mechanisms.
期刊介绍:
Journal of Machinery Manufacture and Reliability is devoted to advances in machine design; CAD/CAM; experimental mechanics of machines, machine life expectancy, and reliability studies; machine dynamics and kinematics; vibration, acoustics, and stress/strain; wear resistance engineering; real-time machine operation diagnostics; robotic systems; new materials and manufacturing processes, and other topics.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
