Federico Ongaro, Stefano Scheggi, ChangKyu Yoon, Frank van den Brink, Seung Hyun Oh, David H Gracias, Sarthak Misra
{"title":"非结构化环境下软无系爪的自主规划与控制。","authors":"Federico Ongaro, Stefano Scheggi, ChangKyu Yoon, Frank van den Brink, Seung Hyun Oh, David H Gracias, Sarthak Misra","doi":"10.1007/s12213-016-0091-1","DOIUrl":null,"url":null,"abstract":"<p><p>The use of small, maneuverable, untethered and reconfigurable robots could provide numerous advantages in various micromanipulation tasks. Examples include microassembly, pick-and-place of fragile micro-objects for lab-on-a-chip applications, assisted hatching for <i>in-vitro</i> fertilization and minimally invasive surgery. This study assesses the potential of soft untethered magnetic grippers as alternatives or complements to conventional tethered or rigid micromanipulators. We demonstrate closed-loop control of untethered grippers and automated pick-and-place of biological material on porcine tissue in an unstructured environment. We also demonstrate the ability of the soft grippers to recognize and sort non-biological micro-scale objects. The fully autonomous nature of the experiments is made possible by the integration of planning and decision-making algorithms, as well as by closed-loop temperature and electromagnetic motion control. The grippers are capable of completing pick-and-place tasks of biological material at an average velocity of 1.8 ±0.71 mm/s and a drop-off error of 0.62 ±0.22 mm. Color-sensitive sorting of three micro-scale objects is completed at a velocity of 1.21 ±0.68 mm/s and a drop-off error of 0.85 ±0.41 mm. Our findings suggest that improved autonomous untethered grippers could augment the capabilities of current soft-robotic instruments especially in advancedtasks involving manipulation.</p>","PeriodicalId":44493,"journal":{"name":"Journal of Micro-Bio Robotics","volume":"12 1","pages":"45-52"},"PeriodicalIF":1.1000,"publicationDate":"2017-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1007/s12213-016-0091-1","citationCount":"62","resultStr":"{\"title\":\"Autonomous planning and control of soft untethered grippers in unstructured environments.\",\"authors\":\"Federico Ongaro, Stefano Scheggi, ChangKyu Yoon, Frank van den Brink, Seung Hyun Oh, David H Gracias, Sarthak Misra\",\"doi\":\"10.1007/s12213-016-0091-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The use of small, maneuverable, untethered and reconfigurable robots could provide numerous advantages in various micromanipulation tasks. Examples include microassembly, pick-and-place of fragile micro-objects for lab-on-a-chip applications, assisted hatching for <i>in-vitro</i> fertilization and minimally invasive surgery. This study assesses the potential of soft untethered magnetic grippers as alternatives or complements to conventional tethered or rigid micromanipulators. We demonstrate closed-loop control of untethered grippers and automated pick-and-place of biological material on porcine tissue in an unstructured environment. We also demonstrate the ability of the soft grippers to recognize and sort non-biological micro-scale objects. The fully autonomous nature of the experiments is made possible by the integration of planning and decision-making algorithms, as well as by closed-loop temperature and electromagnetic motion control. The grippers are capable of completing pick-and-place tasks of biological material at an average velocity of 1.8 ±0.71 mm/s and a drop-off error of 0.62 ±0.22 mm. Color-sensitive sorting of three micro-scale objects is completed at a velocity of 1.21 ±0.68 mm/s and a drop-off error of 0.85 ±0.41 mm. Our findings suggest that improved autonomous untethered grippers could augment the capabilities of current soft-robotic instruments especially in advancedtasks involving manipulation.</p>\",\"PeriodicalId\":44493,\"journal\":{\"name\":\"Journal of Micro-Bio Robotics\",\"volume\":\"12 1\",\"pages\":\"45-52\"},\"PeriodicalIF\":1.1000,\"publicationDate\":\"2017-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1007/s12213-016-0091-1\",\"citationCount\":\"62\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Micro-Bio Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s12213-016-0091-1\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2016/9/12 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Micro-Bio Robotics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s12213-016-0091-1","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2016/9/12 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
Autonomous planning and control of soft untethered grippers in unstructured environments.
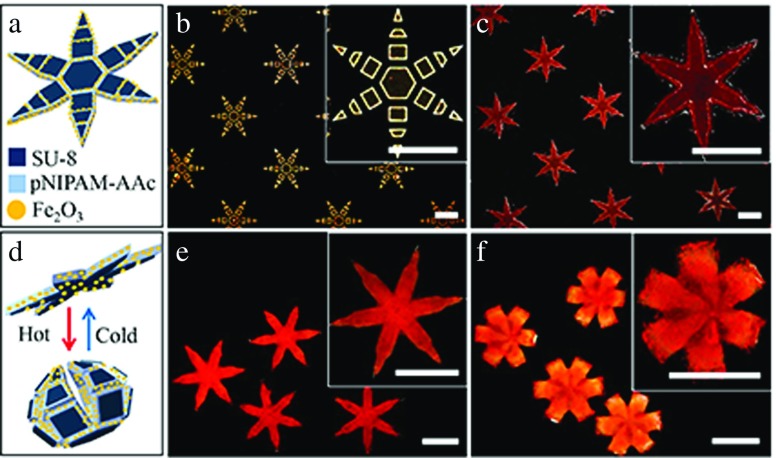
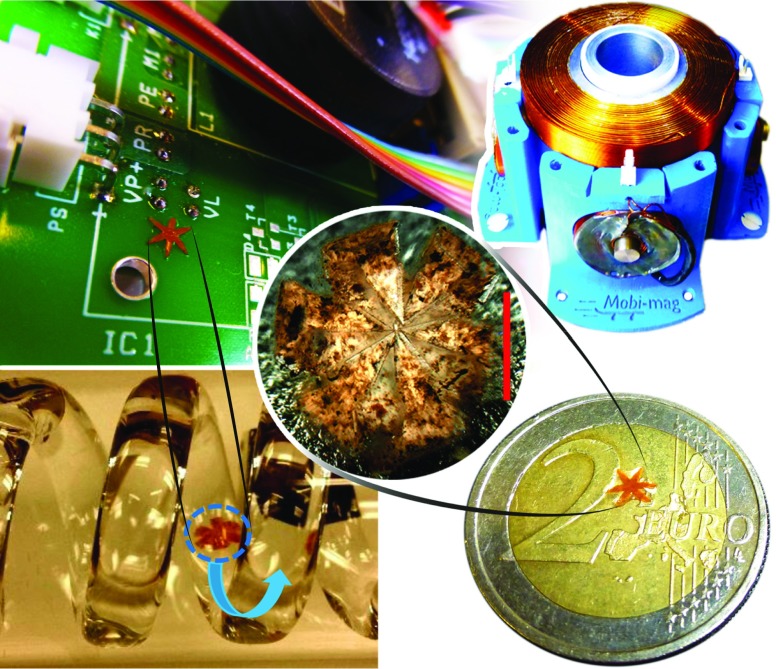
The use of small, maneuverable, untethered and reconfigurable robots could provide numerous advantages in various micromanipulation tasks. Examples include microassembly, pick-and-place of fragile micro-objects for lab-on-a-chip applications, assisted hatching for in-vitro fertilization and minimally invasive surgery. This study assesses the potential of soft untethered magnetic grippers as alternatives or complements to conventional tethered or rigid micromanipulators. We demonstrate closed-loop control of untethered grippers and automated pick-and-place of biological material on porcine tissue in an unstructured environment. We also demonstrate the ability of the soft grippers to recognize and sort non-biological micro-scale objects. The fully autonomous nature of the experiments is made possible by the integration of planning and decision-making algorithms, as well as by closed-loop temperature and electromagnetic motion control. The grippers are capable of completing pick-and-place tasks of biological material at an average velocity of 1.8 ±0.71 mm/s and a drop-off error of 0.62 ±0.22 mm. Color-sensitive sorting of three micro-scale objects is completed at a velocity of 1.21 ±0.68 mm/s and a drop-off error of 0.85 ±0.41 mm. Our findings suggest that improved autonomous untethered grippers could augment the capabilities of current soft-robotic instruments especially in advancedtasks involving manipulation.
期刊介绍:
The Journal of Micro-Bio Robotics (JMBR) focuses on small-scale robotic systems, which could be also biologically inspired, integrated with biological entities, or used for biological or biomedical applications. The journal aims to report the significant progresses in such new research topics.
JMBR is devoted to the theory, experiments, and applications of micro/nano- and biotechnologies and small-scale robotics. It promotes both theoretical and practical engineering research based on the analysis and synthesis from the micro/nano level to the biological level of robotics. JMBR includes survey and research articles.
Authors are invited to submit their original research articles or review articles for publication consideration. All submissions will be peer reviewed subject to the standards of the journal. Manuscripts based on previously published conference papers must be extended substantially.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
