Sriram Garudeswaran, Sohyung Cho, Ikechukwu Ohu, Ali K Panahi
{"title":"微创手术教学回放训练装置。","authors":"Sriram Garudeswaran, Sohyung Cho, Ikechukwu Ohu, Ali K Panahi","doi":"10.1155/2018/4815761","DOIUrl":null,"url":null,"abstract":"<p><p>Recent technological progress offers the opportunity to significantly transform conventional open surgical procedures in ways that allow minimally invasive surgery (MIS) to be accomplished by specific operative instruments' entry into the body through key-sized holes rather than large incisions. Although MIS offers an opportunity for less trauma and quicker recovery, thereby reducing length of hospital stay and attendant costs, the complex nature of this procedure makes it difficult to master, not least because of the limited work area and constricted degree of freedom. Accordingly, this research seeks to design a Teach and Playback device that can aid surgical training by key-framing and then reproducing surgical motions. The result is an inexpensive and portable Teach and Playback laparoscopic training device that can record a trainer's surgical motions and then play them back for trainees. Indeed, such a device could provide a training platform for surgical residents generally and would also be susceptible of many other applications for other robot-assisted tasks that might require complex motion training and control.</p>","PeriodicalId":45110,"journal":{"name":"Minimally Invasive Surgery","volume":"2018 ","pages":"4815761"},"PeriodicalIF":1.3000,"publicationDate":"2018-01-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1155/2018/4815761","citationCount":"7","resultStr":"{\"title\":\"Teach and Playback Training Device for Minimally Invasive Surgery.\",\"authors\":\"Sriram Garudeswaran, Sohyung Cho, Ikechukwu Ohu, Ali K Panahi\",\"doi\":\"10.1155/2018/4815761\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Recent technological progress offers the opportunity to significantly transform conventional open surgical procedures in ways that allow minimally invasive surgery (MIS) to be accomplished by specific operative instruments' entry into the body through key-sized holes rather than large incisions. Although MIS offers an opportunity for less trauma and quicker recovery, thereby reducing length of hospital stay and attendant costs, the complex nature of this procedure makes it difficult to master, not least because of the limited work area and constricted degree of freedom. Accordingly, this research seeks to design a Teach and Playback device that can aid surgical training by key-framing and then reproducing surgical motions. The result is an inexpensive and portable Teach and Playback laparoscopic training device that can record a trainer's surgical motions and then play them back for trainees. Indeed, such a device could provide a training platform for surgical residents generally and would also be susceptible of many other applications for other robot-assisted tasks that might require complex motion training and control.</p>\",\"PeriodicalId\":45110,\"journal\":{\"name\":\"Minimally Invasive Surgery\",\"volume\":\"2018 \",\"pages\":\"4815761\"},\"PeriodicalIF\":1.3000,\"publicationDate\":\"2018-01-10\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1155/2018/4815761\",\"citationCount\":\"7\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Minimally Invasive Surgery\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1155/2018/4815761\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2018/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Minimally Invasive Surgery","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1155/2018/4815761","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2018/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"SURGERY","Score":null,"Total":0}
Teach and Playback Training Device for Minimally Invasive Surgery.
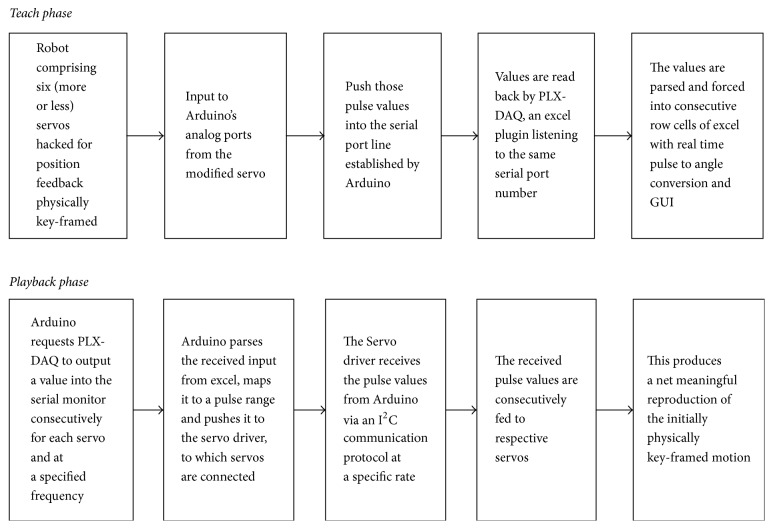
Recent technological progress offers the opportunity to significantly transform conventional open surgical procedures in ways that allow minimally invasive surgery (MIS) to be accomplished by specific operative instruments' entry into the body through key-sized holes rather than large incisions. Although MIS offers an opportunity for less trauma and quicker recovery, thereby reducing length of hospital stay and attendant costs, the complex nature of this procedure makes it difficult to master, not least because of the limited work area and constricted degree of freedom. Accordingly, this research seeks to design a Teach and Playback device that can aid surgical training by key-framing and then reproducing surgical motions. The result is an inexpensive and portable Teach and Playback laparoscopic training device that can record a trainer's surgical motions and then play them back for trainees. Indeed, such a device could provide a training platform for surgical residents generally and would also be susceptible of many other applications for other robot-assisted tasks that might require complex motion training and control.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
