Lina M Becerra Puyo, Heather M Capel, Shanon K Phelan, Sandra A Wiebe, Kim D Adams
{"title":"使用机器人远程操作系统进行触觉探索。","authors":"Lina M Becerra Puyo, Heather M Capel, Shanon K Phelan, Sandra A Wiebe, Kim D Adams","doi":"10.1177/2055668320969308","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>When children with physical impairments cannot perform hand movements for haptic exploration, they miss opportunities to learn about object properties. Robotics systems with haptic feedback may better enable object exploration.</p><p><strong>Methods: </strong>Twenty-four adults and ten children without physical impairments, and one adult with physical impairments, explored tools to mix substances or transport different sized objects. All participants completed the tasks with both a robotic system and manual exploration. Exploratory procedures used to determine object properties were also observed.</p><p><strong>Results: </strong>Adults and children accurately identified appropriate tools for each task using manual exploration, but they were less accurate using the robotic system. The adult with physical impairment identified appropriate tools for transport in both conditions, however had difficulty identifying tools used for mixing substances. A new exploratory procedure was observed, Tapping, when using the robotic system.</p><p><strong>Conclusions: </strong>Adults and children could make judgements on tool utility for tasks using both manual exploration and the robotic system, however they experienced limitations in the robotics system that require more study. The adult with disabilities required less assistance to explore tools when using the robotic system. The robotic system may be a feasible way for individuals with physical disabilities to perform haptic exploration.</p>","PeriodicalId":43319,"journal":{"name":"Journal of Rehabilitation and Assistive Technologies Engineering","volume":"8 ","pages":"2055668320969308"},"PeriodicalIF":2.0000,"publicationDate":"2021-04-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1177/2055668320969308","citationCount":"1","resultStr":"{\"title\":\"Using a robotic teleoperation system for haptic exploration.\",\"authors\":\"Lina M Becerra Puyo, Heather M Capel, Shanon K Phelan, Sandra A Wiebe, Kim D Adams\",\"doi\":\"10.1177/2055668320969308\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>When children with physical impairments cannot perform hand movements for haptic exploration, they miss opportunities to learn about object properties. Robotics systems with haptic feedback may better enable object exploration.</p><p><strong>Methods: </strong>Twenty-four adults and ten children without physical impairments, and one adult with physical impairments, explored tools to mix substances or transport different sized objects. All participants completed the tasks with both a robotic system and manual exploration. Exploratory procedures used to determine object properties were also observed.</p><p><strong>Results: </strong>Adults and children accurately identified appropriate tools for each task using manual exploration, but they were less accurate using the robotic system. The adult with physical impairment identified appropriate tools for transport in both conditions, however had difficulty identifying tools used for mixing substances. A new exploratory procedure was observed, Tapping, when using the robotic system.</p><p><strong>Conclusions: </strong>Adults and children could make judgements on tool utility for tasks using both manual exploration and the robotic system, however they experienced limitations in the robotics system that require more study. The adult with disabilities required less assistance to explore tools when using the robotic system. The robotic system may be a feasible way for individuals with physical disabilities to perform haptic exploration.</p>\",\"PeriodicalId\":43319,\"journal\":{\"name\":\"Journal of Rehabilitation and Assistive Technologies Engineering\",\"volume\":\"8 \",\"pages\":\"2055668320969308\"},\"PeriodicalIF\":2.0000,\"publicationDate\":\"2021-04-14\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1177/2055668320969308\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Rehabilitation and Assistive Technologies Engineering\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1177/2055668320969308\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2021/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Rehabilitation and Assistive Technologies Engineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1177/2055668320969308","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2021/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Using a robotic teleoperation system for haptic exploration.
Introduction: When children with physical impairments cannot perform hand movements for haptic exploration, they miss opportunities to learn about object properties. Robotics systems with haptic feedback may better enable object exploration.
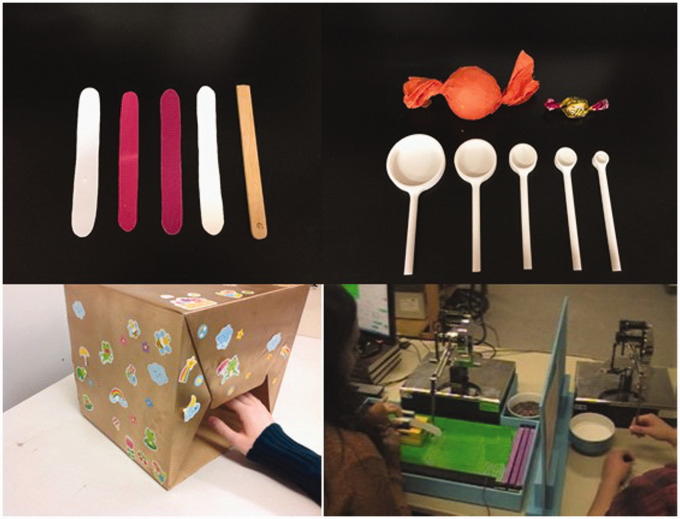
Methods: Twenty-four adults and ten children without physical impairments, and one adult with physical impairments, explored tools to mix substances or transport different sized objects. All participants completed the tasks with both a robotic system and manual exploration. Exploratory procedures used to determine object properties were also observed.
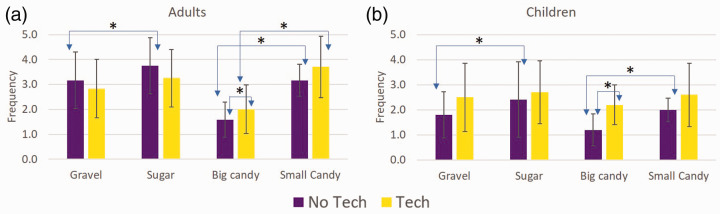
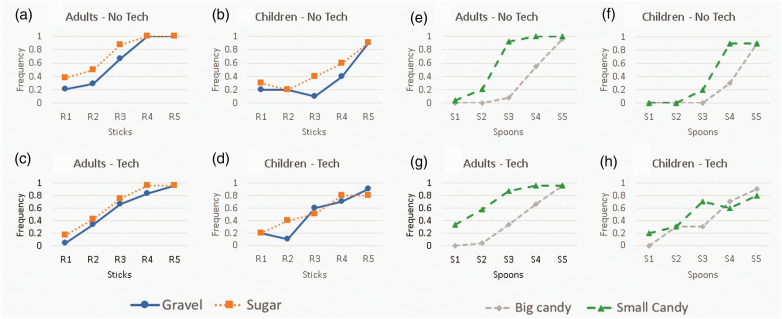
Results: Adults and children accurately identified appropriate tools for each task using manual exploration, but they were less accurate using the robotic system. The adult with physical impairment identified appropriate tools for transport in both conditions, however had difficulty identifying tools used for mixing substances. A new exploratory procedure was observed, Tapping, when using the robotic system.
Conclusions: Adults and children could make judgements on tool utility for tasks using both manual exploration and the robotic system, however they experienced limitations in the robotics system that require more study. The adult with disabilities required less assistance to explore tools when using the robotic system. The robotic system may be a feasible way for individuals with physical disabilities to perform haptic exploration.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
