{"title":"适应抓取的刚软耦合机器人夹具","authors":"Zhiyuan He, Binbin Lian, Yimin Song","doi":"10.1007/s42235-023-00405-2","DOIUrl":null,"url":null,"abstract":"<div><p>Inspired by the morphology of human fingers, this paper proposes an underactuated rigid-soft coupled robotic gripper whose finger is designed as the combination of a rigid skeleton and a soft tissue. Different from the current grippers who have multi-point contact or line contact with the target objects, the proposed robotic gripper enables surface contact and leads to flexible grasping and robust holding. The actuated mechanism, which is the palm of proposed gripper, is optimized for excellent operability based on a mathematical model. Soft material selection and rigid skeleton structure of fingers are then analyzed through a series of dynamic simulations by RecurDyn and Adams. After above design process including topology analysis, actuated mechanism optimization, soft material selection and rigid skeleton analysis, the rigid-soft coupled robotic gripper is fabricated via 3D printing. Finally, the grasping and holding capabilities are validated by experiments testing the stiffness of a single finger and the impact resistance of the gripper. Experimental results show that the proposed rigid-soft coupled robotic gripper can adapt to objects with different properties (shape, size, weight and softness) and hold them steadily. It confirms the feasibility of the design procedure, as well as the compliant and dexterous grasping capabilities of proposed rigid-soft coupled gripper.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"20 6","pages":"2601 - 2618"},"PeriodicalIF":5.8000,"publicationDate":"2023-06-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Rigid-Soft Coupled Robotic Gripper for Adaptable Grasping\",\"authors\":\"Zhiyuan He, Binbin Lian, Yimin Song\",\"doi\":\"10.1007/s42235-023-00405-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Inspired by the morphology of human fingers, this paper proposes an underactuated rigid-soft coupled robotic gripper whose finger is designed as the combination of a rigid skeleton and a soft tissue. Different from the current grippers who have multi-point contact or line contact with the target objects, the proposed robotic gripper enables surface contact and leads to flexible grasping and robust holding. The actuated mechanism, which is the palm of proposed gripper, is optimized for excellent operability based on a mathematical model. Soft material selection and rigid skeleton structure of fingers are then analyzed through a series of dynamic simulations by RecurDyn and Adams. After above design process including topology analysis, actuated mechanism optimization, soft material selection and rigid skeleton analysis, the rigid-soft coupled robotic gripper is fabricated via 3D printing. Finally, the grasping and holding capabilities are validated by experiments testing the stiffness of a single finger and the impact resistance of the gripper. Experimental results show that the proposed rigid-soft coupled robotic gripper can adapt to objects with different properties (shape, size, weight and softness) and hold them steadily. It confirms the feasibility of the design procedure, as well as the compliant and dexterous grasping capabilities of proposed rigid-soft coupled gripper.</p></div>\",\"PeriodicalId\":614,\"journal\":{\"name\":\"Journal of Bionic Engineering\",\"volume\":\"20 6\",\"pages\":\"2601 - 2618\"},\"PeriodicalIF\":5.8000,\"publicationDate\":\"2023-06-30\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Bionic Engineering\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s42235-023-00405-2\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-023-00405-2","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
Rigid-Soft Coupled Robotic Gripper for Adaptable Grasping
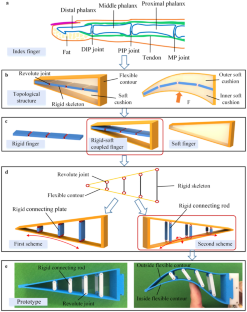
Inspired by the morphology of human fingers, this paper proposes an underactuated rigid-soft coupled robotic gripper whose finger is designed as the combination of a rigid skeleton and a soft tissue. Different from the current grippers who have multi-point contact or line contact with the target objects, the proposed robotic gripper enables surface contact and leads to flexible grasping and robust holding. The actuated mechanism, which is the palm of proposed gripper, is optimized for excellent operability based on a mathematical model. Soft material selection and rigid skeleton structure of fingers are then analyzed through a series of dynamic simulations by RecurDyn and Adams. After above design process including topology analysis, actuated mechanism optimization, soft material selection and rigid skeleton analysis, the rigid-soft coupled robotic gripper is fabricated via 3D printing. Finally, the grasping and holding capabilities are validated by experiments testing the stiffness of a single finger and the impact resistance of the gripper. Experimental results show that the proposed rigid-soft coupled robotic gripper can adapt to objects with different properties (shape, size, weight and softness) and hold them steadily. It confirms the feasibility of the design procedure, as well as the compliant and dexterous grasping capabilities of proposed rigid-soft coupled gripper.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
