{"title":"汽车应用机器人电阻点焊循环时间的优化","authors":"Harish Kumar Banga, Parveen Kalra, Raman Kumar, Sunpreet Singh, Catalin I. Pruncu","doi":"10.1002/amp2.10084","DOIUrl":null,"url":null,"abstract":"<p>In the automobile manufacturing industry, resistance spot welding (RSW) is widely used, especially to build the car's body. The RSW is a standard and wide-ranging joining technique in several assembling ventures, showing a wide range of possibilities for a competent procedure. Robots are commonly used for spot welding in various industrial applications. After completing assembling design, interest increases to improve the designed processes, cost-reduction, environmental impact, and increase time productivity when all is said to be done. In this paper, the robot movement between two welding points, a path followed while spotting, gripping and payload-carrying activities, numbers of holds, moves, and a possibility to enhance interaction between four Robots were analyzed using an offline Robot simulation software “<i>DELMIA</i>-V5.” The body shop assembly line of the SML ISUZU plant has four robots that perform about 209 welding spots in 532 s. The optimal model reduced the whole welding cycle time by 68 s, and after modification and proper sequencing, a12.7% reduction in cycle time was achieved. The offline Robot simulation software “<i>DELMIA</i>-V5” has good potential to produce optimal algorithms while saving precious time. It enables an organization to promote higher quality and to encourage meaningful creativity by reducing design flaws.</p>","PeriodicalId":87290,"journal":{"name":"Journal of advanced manufacturing and processing","volume":"3 3","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2021-04-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1002/amp2.10084","citationCount":"22","resultStr":"{\"title\":\"Optimization of the cycle time of robotics resistance spot welding for automotive applications\",\"authors\":\"Harish Kumar Banga, Parveen Kalra, Raman Kumar, Sunpreet Singh, Catalin I. Pruncu\",\"doi\":\"10.1002/amp2.10084\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In the automobile manufacturing industry, resistance spot welding (RSW) is widely used, especially to build the car's body. The RSW is a standard and wide-ranging joining technique in several assembling ventures, showing a wide range of possibilities for a competent procedure. Robots are commonly used for spot welding in various industrial applications. After completing assembling design, interest increases to improve the designed processes, cost-reduction, environmental impact, and increase time productivity when all is said to be done. In this paper, the robot movement between two welding points, a path followed while spotting, gripping and payload-carrying activities, numbers of holds, moves, and a possibility to enhance interaction between four Robots were analyzed using an offline Robot simulation software “<i>DELMIA</i>-V5.” The body shop assembly line of the SML ISUZU plant has four robots that perform about 209 welding spots in 532 s. The optimal model reduced the whole welding cycle time by 68 s, and after modification and proper sequencing, a12.7% reduction in cycle time was achieved. The offline Robot simulation software “<i>DELMIA</i>-V5” has good potential to produce optimal algorithms while saving precious time. It enables an organization to promote higher quality and to encourage meaningful creativity by reducing design flaws.</p>\",\"PeriodicalId\":87290,\"journal\":{\"name\":\"Journal of advanced manufacturing and processing\",\"volume\":\"3 3\",\"pages\":\"\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2021-04-03\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1002/amp2.10084\",\"citationCount\":\"22\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of advanced manufacturing and processing\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/amp2.10084\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of advanced manufacturing and processing","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/amp2.10084","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Optimization of the cycle time of robotics resistance spot welding for automotive applications
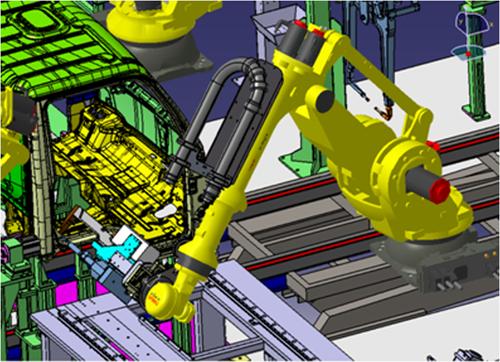
In the automobile manufacturing industry, resistance spot welding (RSW) is widely used, especially to build the car's body. The RSW is a standard and wide-ranging joining technique in several assembling ventures, showing a wide range of possibilities for a competent procedure. Robots are commonly used for spot welding in various industrial applications. After completing assembling design, interest increases to improve the designed processes, cost-reduction, environmental impact, and increase time productivity when all is said to be done. In this paper, the robot movement between two welding points, a path followed while spotting, gripping and payload-carrying activities, numbers of holds, moves, and a possibility to enhance interaction between four Robots were analyzed using an offline Robot simulation software “DELMIA-V5.” The body shop assembly line of the SML ISUZU plant has four robots that perform about 209 welding spots in 532 s. The optimal model reduced the whole welding cycle time by 68 s, and after modification and proper sequencing, a12.7% reduction in cycle time was achieved. The offline Robot simulation software “DELMIA-V5” has good potential to produce optimal algorithms while saving precious time. It enables an organization to promote higher quality and to encourage meaningful creativity by reducing design flaws.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
