Gunhild Elisabeth Berget, Jo Eidsvik, Morten Omholt Alver, Tor Arne Johansen
{"title":"基于AUV的环境变量自适应采样动态随机建模","authors":"Gunhild Elisabeth Berget, Jo Eidsvik, Morten Omholt Alver, Tor Arne Johansen","doi":"10.1007/s10514-023-10095-8","DOIUrl":null,"url":null,"abstract":"<div><p>Discharge of mine tailings significantly impacts the ecological status of the sea. Methods to efficiently monitor the extent of dispersion is essential to protect sensitive areas. By combining underwater robotic sampling with ocean models, we can choose informative sampling sites and adaptively change the robot’s path based on in situ measurements to optimally map the tailings distribution near a seafill. This paper creates a stochastic spatio-temporal proxy model of dispersal dynamics using training data from complex numerical models. The proxy model consists of a spatio-temporal Gaussian process model based on an advection–diffusion stochastic partial differential equation. Informative sampling sites are chosen based on predictions from the proxy model using an objective function favoring areas with high uncertainty and high expected tailings concentrations. A simulation study and data from real-life experiments are presented.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 4","pages":"483 - 502"},"PeriodicalIF":4.3000,"publicationDate":"2023-04-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10095-8.pdf","citationCount":"0","resultStr":"{\"title\":\"Dynamic stochastic modeling for adaptive sampling of environmental variables using an AUV\",\"authors\":\"Gunhild Elisabeth Berget, Jo Eidsvik, Morten Omholt Alver, Tor Arne Johansen\",\"doi\":\"10.1007/s10514-023-10095-8\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Discharge of mine tailings significantly impacts the ecological status of the sea. Methods to efficiently monitor the extent of dispersion is essential to protect sensitive areas. By combining underwater robotic sampling with ocean models, we can choose informative sampling sites and adaptively change the robot’s path based on in situ measurements to optimally map the tailings distribution near a seafill. This paper creates a stochastic spatio-temporal proxy model of dispersal dynamics using training data from complex numerical models. The proxy model consists of a spatio-temporal Gaussian process model based on an advection–diffusion stochastic partial differential equation. Informative sampling sites are chosen based on predictions from the proxy model using an objective function favoring areas with high uncertainty and high expected tailings concentrations. A simulation study and data from real-life experiments are presented.\\n</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 4\",\"pages\":\"483 - 502\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2023-04-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10095-8.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10095-8\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10095-8","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Dynamic stochastic modeling for adaptive sampling of environmental variables using an AUV
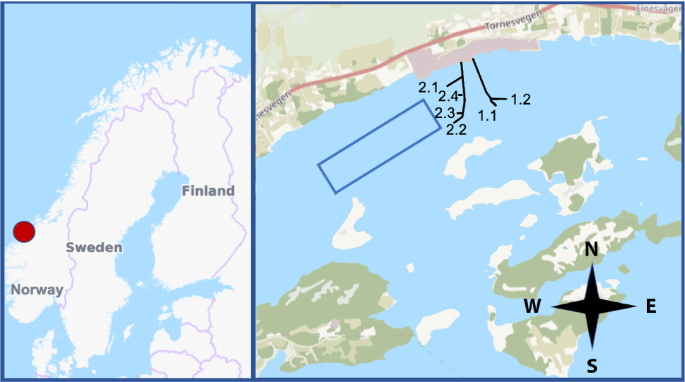
Discharge of mine tailings significantly impacts the ecological status of the sea. Methods to efficiently monitor the extent of dispersion is essential to protect sensitive areas. By combining underwater robotic sampling with ocean models, we can choose informative sampling sites and adaptively change the robot’s path based on in situ measurements to optimally map the tailings distribution near a seafill. This paper creates a stochastic spatio-temporal proxy model of dispersal dynamics using training data from complex numerical models. The proxy model consists of a spatio-temporal Gaussian process model based on an advection–diffusion stochastic partial differential equation. Informative sampling sites are chosen based on predictions from the proxy model using an objective function favoring areas with high uncertainty and high expected tailings concentrations. A simulation study and data from real-life experiments are presented.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
