Álvaro Serra-Gómez, Hai Zhu, Bruno Brito, Wendelin Böhmer, Javier Alonso-Mora
{"title":"学习可扩展且高效的多机器人防撞通信策略","authors":"Álvaro Serra-Gómez, Hai Zhu, Bruno Brito, Wendelin Böhmer, Javier Alonso-Mora","doi":"10.1007/s10514-023-10127-3","DOIUrl":null,"url":null,"abstract":"<div><p>Decentralized multi-robot systems typically perform coordinated motion planning by constantly broadcasting their intentions to avoid collisions. However, the risk of collision between robots varies as they move and communication may not always be needed. This paper presents an efficient communication method that addresses the problem of “when” and “with whom” to communicate in multi-robot collision avoidance scenarios. In this approach, each robot learns to reason about other robots’ states and considers the risk of future collisions before asking for the trajectory plans of other robots. We introduce a new neural architecture for the learned communication policy which allows our method to be scalable. We evaluate and verify the proposed communication strategy in simulation with up to twelve quadrotors, and present results on the zero-shot generalization/robustness capabilities of the policy in different scenarios. We demonstrate that our policy (learned in a simulated environment) can be successfully transferred to real robots.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"47 8","pages":"1275 - 1297"},"PeriodicalIF":4.3000,"publicationDate":"2023-08-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10127-3.pdf","citationCount":"0","resultStr":"{\"title\":\"Learning scalable and efficient communication policies for multi-robot collision avoidance\",\"authors\":\"Álvaro Serra-Gómez, Hai Zhu, Bruno Brito, Wendelin Böhmer, Javier Alonso-Mora\",\"doi\":\"10.1007/s10514-023-10127-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Decentralized multi-robot systems typically perform coordinated motion planning by constantly broadcasting their intentions to avoid collisions. However, the risk of collision between robots varies as they move and communication may not always be needed. This paper presents an efficient communication method that addresses the problem of “when” and “with whom” to communicate in multi-robot collision avoidance scenarios. In this approach, each robot learns to reason about other robots’ states and considers the risk of future collisions before asking for the trajectory plans of other robots. We introduce a new neural architecture for the learned communication policy which allows our method to be scalable. We evaluate and verify the proposed communication strategy in simulation with up to twelve quadrotors, and present results on the zero-shot generalization/robustness capabilities of the policy in different scenarios. We demonstrate that our policy (learned in a simulated environment) can be successfully transferred to real robots.\\n</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"47 8\",\"pages\":\"1275 - 1297\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2023-08-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10127-3.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10127-3\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10127-3","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Learning scalable and efficient communication policies for multi-robot collision avoidance
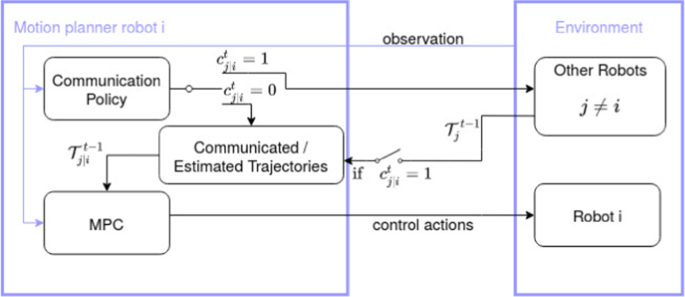
Decentralized multi-robot systems typically perform coordinated motion planning by constantly broadcasting their intentions to avoid collisions. However, the risk of collision between robots varies as they move and communication may not always be needed. This paper presents an efficient communication method that addresses the problem of “when” and “with whom” to communicate in multi-robot collision avoidance scenarios. In this approach, each robot learns to reason about other robots’ states and considers the risk of future collisions before asking for the trajectory plans of other robots. We introduce a new neural architecture for the learned communication policy which allows our method to be scalable. We evaluate and verify the proposed communication strategy in simulation with up to twelve quadrotors, and present results on the zero-shot generalization/robustness capabilities of the policy in different scenarios. We demonstrate that our policy (learned in a simulated environment) can be successfully transferred to real robots.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
