Yifan Zhou, Shubham Sonawani, Mariano Phielipp, Heni Ben Amor, Simon Stepputtis
{"title":"通过注意力学习模块化语言条件机器人策略","authors":"Yifan Zhou, Shubham Sonawani, Mariano Phielipp, Heni Ben Amor, Simon Stepputtis","doi":"10.1007/s10514-023-10129-1","DOIUrl":null,"url":null,"abstract":"<div><p>Training language-conditioned policies is typically time-consuming and resource-intensive. Additionally, the resulting controllers are tailored to the specific robot they were trained on, making it difficult to transfer them to other robots with different dynamics. To address these challenges, we propose a new approach called Hierarchical Modularity, which enables more efficient training and subsequent transfer of such policies across different types of robots. The approach incorporates Supervised Attention which bridges the gap between modular and end-to-end learning by enabling the re-use of functional building blocks. In this contribution, we build upon our previous work, showcasing the extended utilities and improved performance by expanding the hierarchy to include new tasks and introducing an automated pipeline for synthesizing a large quantity of novel objects. We demonstrate the effectiveness of this approach through extensive simulated and real-world robot manipulation experiments.\n</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":null,"pages":null},"PeriodicalIF":3.7000,"publicationDate":"2023-08-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s10514-023-10129-1.pdf","citationCount":"1","resultStr":"{\"title\":\"Learning modular language-conditioned robot policies through attention\",\"authors\":\"Yifan Zhou, Shubham Sonawani, Mariano Phielipp, Heni Ben Amor, Simon Stepputtis\",\"doi\":\"10.1007/s10514-023-10129-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Training language-conditioned policies is typically time-consuming and resource-intensive. Additionally, the resulting controllers are tailored to the specific robot they were trained on, making it difficult to transfer them to other robots with different dynamics. To address these challenges, we propose a new approach called Hierarchical Modularity, which enables more efficient training and subsequent transfer of such policies across different types of robots. The approach incorporates Supervised Attention which bridges the gap between modular and end-to-end learning by enabling the re-use of functional building blocks. In this contribution, we build upon our previous work, showcasing the extended utilities and improved performance by expanding the hierarchy to include new tasks and introducing an automated pipeline for synthesizing a large quantity of novel objects. We demonstrate the effectiveness of this approach through extensive simulated and real-world robot manipulation experiments.\\n</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":null,\"pages\":null},\"PeriodicalIF\":3.7000,\"publicationDate\":\"2023-08-30\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s10514-023-10129-1.pdf\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-023-10129-1\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-023-10129-1","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Learning modular language-conditioned robot policies through attention
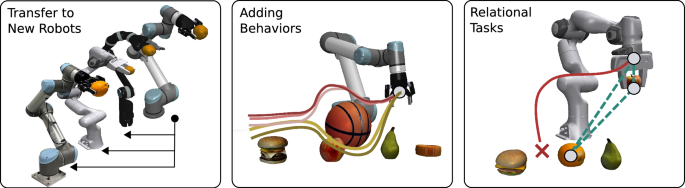
Training language-conditioned policies is typically time-consuming and resource-intensive. Additionally, the resulting controllers are tailored to the specific robot they were trained on, making it difficult to transfer them to other robots with different dynamics. To address these challenges, we propose a new approach called Hierarchical Modularity, which enables more efficient training and subsequent transfer of such policies across different types of robots. The approach incorporates Supervised Attention which bridges the gap between modular and end-to-end learning by enabling the re-use of functional building blocks. In this contribution, we build upon our previous work, showcasing the extended utilities and improved performance by expanding the hierarchy to include new tasks and introducing an automated pipeline for synthesizing a large quantity of novel objects. We demonstrate the effectiveness of this approach through extensive simulated and real-world robot manipulation experiments.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
