{"title":"具有相关噪声的随机不确定多传感器系统的顺序不敏感最优广义序列融合估计","authors":"Dejin Wang, Zhongxin Liu, Zengqiang Chen","doi":"10.1049/sil2.12217","DOIUrl":null,"url":null,"abstract":"<p>The globally optimal generalised sequential fusion (GSF) algorithm in the sense of linear minimum variance for multi-sensor stochastic uncertain systems is investigated by the authors. Specifically, in the GSF algorithm, the estimation of measurement noise is considered, and <i>m</i><sub><i>a</i></sub> (<i>m</i><sub><i>a</i></sub> ≥ 1) sensors' measurement data are fused at the <i>a</i>th reception instant, which makes it very flexible and suitable for practical applications. The centralised and sequential fusion algorithms are special cases of the proposed GSF algorithm. Furthermore, for any <i>m</i><sub><i>a</i></sub>, <i>a</i> = 1, 2, …, <i>M</i>, the estimated values of the GSF algorithm remain invariant and globally optimal. Moreover, the independence between the estimated values and fusion order is proved in the proposed GSF algorithm. Finally, simulation results are given to demonstrate the usefulness of the developed algorithm.</p>","PeriodicalId":56301,"journal":{"name":"IET Signal Processing","volume":"17 5","pages":""},"PeriodicalIF":1.4000,"publicationDate":"2023-05-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/sil2.12217","citationCount":"0","resultStr":"{\"title\":\"An order insensitive optimal generalised sequential fusion estimation for stochastic uncertain multi-sensor systems with correlated noise\",\"authors\":\"Dejin Wang, Zhongxin Liu, Zengqiang Chen\",\"doi\":\"10.1049/sil2.12217\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The globally optimal generalised sequential fusion (GSF) algorithm in the sense of linear minimum variance for multi-sensor stochastic uncertain systems is investigated by the authors. Specifically, in the GSF algorithm, the estimation of measurement noise is considered, and <i>m</i><sub><i>a</i></sub> (<i>m</i><sub><i>a</i></sub> ≥ 1) sensors' measurement data are fused at the <i>a</i>th reception instant, which makes it very flexible and suitable for practical applications. The centralised and sequential fusion algorithms are special cases of the proposed GSF algorithm. Furthermore, for any <i>m</i><sub><i>a</i></sub>, <i>a</i> = 1, 2, …, <i>M</i>, the estimated values of the GSF algorithm remain invariant and globally optimal. Moreover, the independence between the estimated values and fusion order is proved in the proposed GSF algorithm. Finally, simulation results are given to demonstrate the usefulness of the developed algorithm.</p>\",\"PeriodicalId\":56301,\"journal\":{\"name\":\"IET Signal Processing\",\"volume\":\"17 5\",\"pages\":\"\"},\"PeriodicalIF\":1.4000,\"publicationDate\":\"2023-05-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/sil2.12217\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Signal Processing\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/sil2.12217\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Signal Processing","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/sil2.12217","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
An order insensitive optimal generalised sequential fusion estimation for stochastic uncertain multi-sensor systems with correlated noise
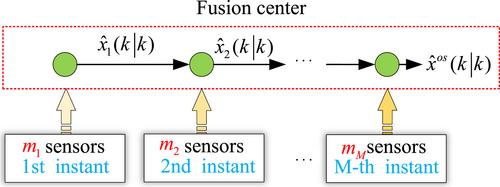
The globally optimal generalised sequential fusion (GSF) algorithm in the sense of linear minimum variance for multi-sensor stochastic uncertain systems is investigated by the authors. Specifically, in the GSF algorithm, the estimation of measurement noise is considered, and ma (ma ≥ 1) sensors' measurement data are fused at the ath reception instant, which makes it very flexible and suitable for practical applications. The centralised and sequential fusion algorithms are special cases of the proposed GSF algorithm. Furthermore, for any ma, a = 1, 2, …, M, the estimated values of the GSF algorithm remain invariant and globally optimal. Moreover, the independence between the estimated values and fusion order is proved in the proposed GSF algorithm. Finally, simulation results are given to demonstrate the usefulness of the developed algorithm.
期刊介绍:
IET Signal Processing publishes research on a diverse range of signal processing and machine learning topics, covering a variety of applications, disciplines, modalities, and techniques in detection, estimation, inference, and classification problems. The research published includes advances in algorithm design for the analysis of single and high-multi-dimensional data, sparsity, linear and non-linear systems, recursive and non-recursive digital filters and multi-rate filter banks, as well a range of topics that span from sensor array processing, deep convolutional neural network based approaches to the application of chaos theory, and far more.
Topics covered by scope include, but are not limited to:
advances in single and multi-dimensional filter design and implementation
linear and nonlinear, fixed and adaptive digital filters and multirate filter banks
statistical signal processing techniques and analysis
classical, parametric and higher order spectral analysis
signal transformation and compression techniques, including time-frequency analysis
system modelling and adaptive identification techniques
machine learning based approaches to signal processing
Bayesian methods for signal processing, including Monte-Carlo Markov-chain and particle filtering techniques
theory and application of blind and semi-blind signal separation techniques
signal processing techniques for analysis, enhancement, coding, synthesis and recognition of speech signals
direction-finding and beamforming techniques for audio and electromagnetic signals
analysis techniques for biomedical signals
baseband signal processing techniques for transmission and reception of communication signals
signal processing techniques for data hiding and audio watermarking
sparse signal processing and compressive sensing
Special Issue Call for Papers:
Intelligent Deep Fuzzy Model for Signal Processing - https://digital-library.theiet.org/files/IET_SPR_CFP_IDFMSP.pdf



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
