{"title":"障碍物变换器:一种基于周围轨迹的轨迹预测网络","authors":"Wendong Zhang, Qingjie Chai, Quanqi Zhang, Chengwei Wu","doi":"10.1049/csy2.12066","DOIUrl":null,"url":null,"abstract":"<p>Recurrent Neural Network, Long Short-Term Memory, and Transformer have made great progress in predicting the trajectories of moving objects. Although the trajectory element with the surrounding scene features has been merged to improve performance, there still exist some problems to be solved. One is that the time series processing models will increase the inference time with the increase of the number of prediction sequences. Another problem is that the features cannot be extracted from the scene's image and point cloud in some situations. Therefore, an Obstacle-Transformer is proposed to predict trajectory in a constant inference time. An ‘obstacle’ is designed by the surrounding trajectory rather than images or point clouds, making Obstacle-Transformer more applicable in a wider range of scenarios. Experiments are conducted on ETH and UCY datasets to verify the performance of our model.</p>","PeriodicalId":34110,"journal":{"name":"IET Cybersystems and Robotics","volume":"5 1","pages":""},"PeriodicalIF":1.2000,"publicationDate":"2022-10-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/csy2.12066","citationCount":"0","resultStr":"{\"title\":\"Obstacle-transformer: A trajectory prediction network based on surrounding trajectories\",\"authors\":\"Wendong Zhang, Qingjie Chai, Quanqi Zhang, Chengwei Wu\",\"doi\":\"10.1049/csy2.12066\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Recurrent Neural Network, Long Short-Term Memory, and Transformer have made great progress in predicting the trajectories of moving objects. Although the trajectory element with the surrounding scene features has been merged to improve performance, there still exist some problems to be solved. One is that the time series processing models will increase the inference time with the increase of the number of prediction sequences. Another problem is that the features cannot be extracted from the scene's image and point cloud in some situations. Therefore, an Obstacle-Transformer is proposed to predict trajectory in a constant inference time. An ‘obstacle’ is designed by the surrounding trajectory rather than images or point clouds, making Obstacle-Transformer more applicable in a wider range of scenarios. Experiments are conducted on ETH and UCY datasets to verify the performance of our model.</p>\",\"PeriodicalId\":34110,\"journal\":{\"name\":\"IET Cybersystems and Robotics\",\"volume\":\"5 1\",\"pages\":\"\"},\"PeriodicalIF\":1.2000,\"publicationDate\":\"2022-10-21\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/csy2.12066\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Cybersystems and Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/csy2.12066\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Cybersystems and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/csy2.12066","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Obstacle-transformer: A trajectory prediction network based on surrounding trajectories
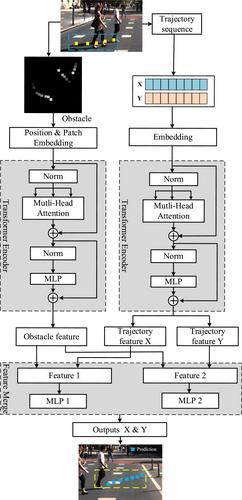
Recurrent Neural Network, Long Short-Term Memory, and Transformer have made great progress in predicting the trajectories of moving objects. Although the trajectory element with the surrounding scene features has been merged to improve performance, there still exist some problems to be solved. One is that the time series processing models will increase the inference time with the increase of the number of prediction sequences. Another problem is that the features cannot be extracted from the scene's image and point cloud in some situations. Therefore, an Obstacle-Transformer is proposed to predict trajectory in a constant inference time. An ‘obstacle’ is designed by the surrounding trajectory rather than images or point clouds, making Obstacle-Transformer more applicable in a wider range of scenarios. Experiments are conducted on ETH and UCY datasets to verify the performance of our model.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
