{"title":"SafeCrowdNav:复杂场景下机器人人群导航的安全评估。","authors":"Jing Xu, Wanruo Zhang, Jialun Cai, Hong Liu","doi":"10.3389/fnbot.2023.1276519","DOIUrl":null,"url":null,"abstract":"<p><p>Navigating safely and efficiently in dense crowds remains a challenging problem for mobile robots. The interaction mechanisms involved in collision avoidance require robots to exhibit active and foresighted behaviors while understanding the crowd dynamics. Deep reinforcement learning methods have shown superior performance compared to model-based approaches. However, existing methods lack an intuitive and quantitative safety evaluation for agents, and they may potentially trap agents in local optima during training, hindering their ability to learn optimal strategies. In addition, sparse reward problems further compound these limitations. To address these challenges, we propose SafeCrowdNav, a comprehensive crowd navigation algorithm that emphasizes obstacle avoidance in complex environments. Our approach incorporates a safety evaluation function to quantitatively assess the current safety score and an intrinsic exploration reward to balance exploration and exploitation based on scene constraints. By combining prioritized experience replay and hindsight experience replay techniques, our model effectively learns the optimal navigation policy in crowded environments. Experimental outcomes reveal that our approach enables robots to improve crowd comprehension during navigation, resulting in reduced collision probabilities and shorter navigation times compared to state-of-the-art algorithms. Our code is available at https://github.com/Janet-xujing-1216/SafeCrowdNav.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"17 ","pages":"1276519"},"PeriodicalIF":2.8000,"publicationDate":"2023-10-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10613488/pdf/","citationCount":"0","resultStr":"{\"title\":\"SafeCrowdNav: safety evaluation of robot crowd navigation in complex scenes.\",\"authors\":\"Jing Xu, Wanruo Zhang, Jialun Cai, Hong Liu\",\"doi\":\"10.3389/fnbot.2023.1276519\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Navigating safely and efficiently in dense crowds remains a challenging problem for mobile robots. The interaction mechanisms involved in collision avoidance require robots to exhibit active and foresighted behaviors while understanding the crowd dynamics. Deep reinforcement learning methods have shown superior performance compared to model-based approaches. However, existing methods lack an intuitive and quantitative safety evaluation for agents, and they may potentially trap agents in local optima during training, hindering their ability to learn optimal strategies. In addition, sparse reward problems further compound these limitations. To address these challenges, we propose SafeCrowdNav, a comprehensive crowd navigation algorithm that emphasizes obstacle avoidance in complex environments. Our approach incorporates a safety evaluation function to quantitatively assess the current safety score and an intrinsic exploration reward to balance exploration and exploitation based on scene constraints. By combining prioritized experience replay and hindsight experience replay techniques, our model effectively learns the optimal navigation policy in crowded environments. Experimental outcomes reveal that our approach enables robots to improve crowd comprehension during navigation, resulting in reduced collision probabilities and shorter navigation times compared to state-of-the-art algorithms. Our code is available at https://github.com/Janet-xujing-1216/SafeCrowdNav.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"17 \",\"pages\":\"1276519\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2023-10-12\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10613488/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2023.1276519\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2023.1276519","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
SafeCrowdNav: safety evaluation of robot crowd navigation in complex scenes.
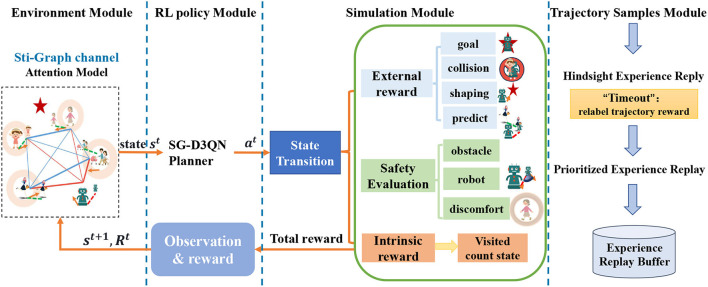
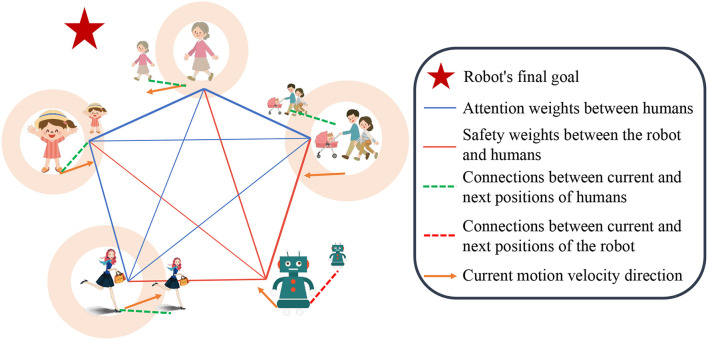
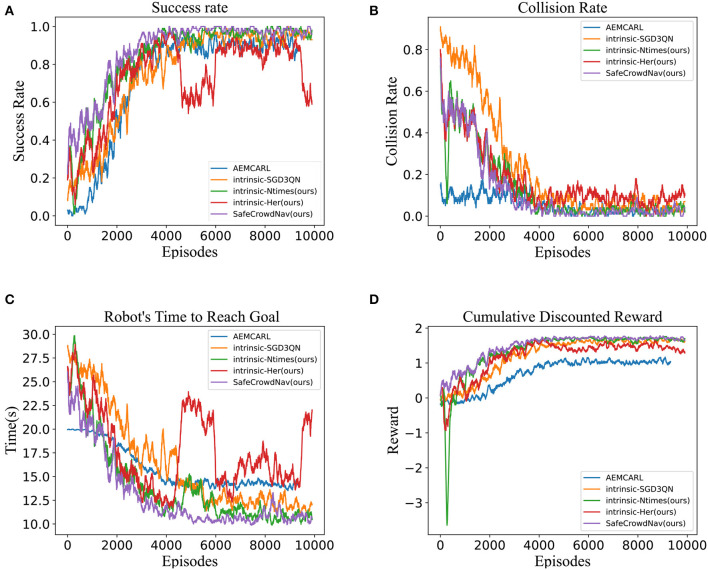
Navigating safely and efficiently in dense crowds remains a challenging problem for mobile robots. The interaction mechanisms involved in collision avoidance require robots to exhibit active and foresighted behaviors while understanding the crowd dynamics. Deep reinforcement learning methods have shown superior performance compared to model-based approaches. However, existing methods lack an intuitive and quantitative safety evaluation for agents, and they may potentially trap agents in local optima during training, hindering their ability to learn optimal strategies. In addition, sparse reward problems further compound these limitations. To address these challenges, we propose SafeCrowdNav, a comprehensive crowd navigation algorithm that emphasizes obstacle avoidance in complex environments. Our approach incorporates a safety evaluation function to quantitatively assess the current safety score and an intrinsic exploration reward to balance exploration and exploitation based on scene constraints. By combining prioritized experience replay and hindsight experience replay techniques, our model effectively learns the optimal navigation policy in crowded environments. Experimental outcomes reveal that our approach enables robots to improve crowd comprehension during navigation, resulting in reduced collision probabilities and shorter navigation times compared to state-of-the-art algorithms. Our code is available at https://github.com/Janet-xujing-1216/SafeCrowdNav.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
