{"title":"基于端到端架构和多模态感知的深度强化学习篮球机器人投篮技能提升研究。","authors":"Jun Zhang, Dayong Tao","doi":"10.3389/fnbot.2023.1274543","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>In the realm of basketball, refining shooting skills and decision-making levels using intelligent agents has garnered significant interest. This study addresses the challenge by introducing an innovative framework that combines multi-modal perception and deep reinforcement learning. The goal is to create basketball robots capable of executing precise shots and informed choices by effectively integrating sensory inputs and learned strategies.</p><p><strong>Methods: </strong>The proposed approach consists of three main components: multi-modal perception, deep reinforcement learning, and end-to-end architecture. Multi-modal perception leverages the multi-head attention mechanism (MATT) to merge visual, motion, and distance cues for a holistic perception of the basketball scenario. The deep reinforcement learning framework utilizes the Deep Q-Network (DQN) algorithm, enabling the robots to learn optimal shooting strategies over iterative interactions with the environment. The end-to-end architecture connects these components, allowing seamless integration of perception and decision-making processes.</p><p><strong>Results: </strong>The experiments conducted demonstrate the effectiveness of the proposed approach. Basketball robots equipped with multi-modal perception and deep reinforcement learning exhibit improved shooting accuracy and enhanced decision-making abilities. The multi-head attention mechanism enhances the robots' perception of complex scenes, leading to more accurate shooting decisions. The application of the DQN algorithm results in gradual skill improvement and strategic optimization through interaction with the environment.</p><p><strong>Discussion: </strong>The integration of multi-modal perception and deep reinforcement learning within an end-to-end architecture presents a promising avenue for advancing basketball robot training and performance. The ability to fuse diverse sensory inputs and learned strategies empowers robots to make informed decisions and execute accurate shots. The research not only contributes to the field of robotics but also has potential implications for human basketball training and coaching methodologies.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"17 ","pages":"1274543"},"PeriodicalIF":2.6000,"publicationDate":"2023-10-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10615595/pdf/","citationCount":"0","resultStr":"{\"title\":\"Research on deep reinforcement learning basketball robot shooting skills improvement based on end to end architecture and multi-modal perception.\",\"authors\":\"Jun Zhang, Dayong Tao\",\"doi\":\"10.3389/fnbot.2023.1274543\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>In the realm of basketball, refining shooting skills and decision-making levels using intelligent agents has garnered significant interest. This study addresses the challenge by introducing an innovative framework that combines multi-modal perception and deep reinforcement learning. The goal is to create basketball robots capable of executing precise shots and informed choices by effectively integrating sensory inputs and learned strategies.</p><p><strong>Methods: </strong>The proposed approach consists of three main components: multi-modal perception, deep reinforcement learning, and end-to-end architecture. Multi-modal perception leverages the multi-head attention mechanism (MATT) to merge visual, motion, and distance cues for a holistic perception of the basketball scenario. The deep reinforcement learning framework utilizes the Deep Q-Network (DQN) algorithm, enabling the robots to learn optimal shooting strategies over iterative interactions with the environment. The end-to-end architecture connects these components, allowing seamless integration of perception and decision-making processes.</p><p><strong>Results: </strong>The experiments conducted demonstrate the effectiveness of the proposed approach. Basketball robots equipped with multi-modal perception and deep reinforcement learning exhibit improved shooting accuracy and enhanced decision-making abilities. The multi-head attention mechanism enhances the robots' perception of complex scenes, leading to more accurate shooting decisions. The application of the DQN algorithm results in gradual skill improvement and strategic optimization through interaction with the environment.</p><p><strong>Discussion: </strong>The integration of multi-modal perception and deep reinforcement learning within an end-to-end architecture presents a promising avenue for advancing basketball robot training and performance. The ability to fuse diverse sensory inputs and learned strategies empowers robots to make informed decisions and execute accurate shots. The research not only contributes to the field of robotics but also has potential implications for human basketball training and coaching methodologies.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"17 \",\"pages\":\"1274543\"},\"PeriodicalIF\":2.6000,\"publicationDate\":\"2023-10-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10615595/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2023.1274543\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2023.1274543","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Research on deep reinforcement learning basketball robot shooting skills improvement based on end to end architecture and multi-modal perception.
Introduction: In the realm of basketball, refining shooting skills and decision-making levels using intelligent agents has garnered significant interest. This study addresses the challenge by introducing an innovative framework that combines multi-modal perception and deep reinforcement learning. The goal is to create basketball robots capable of executing precise shots and informed choices by effectively integrating sensory inputs and learned strategies.
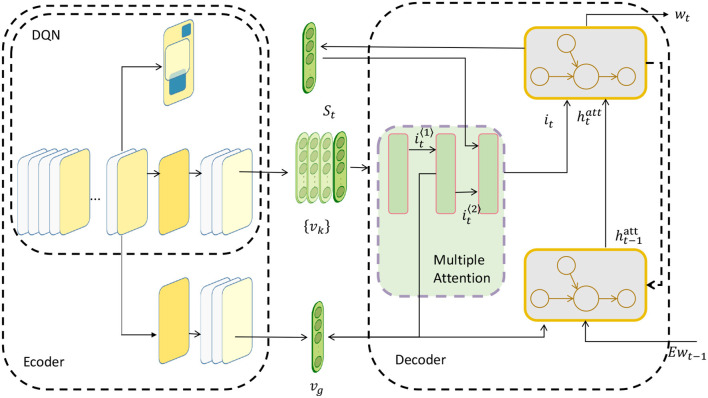
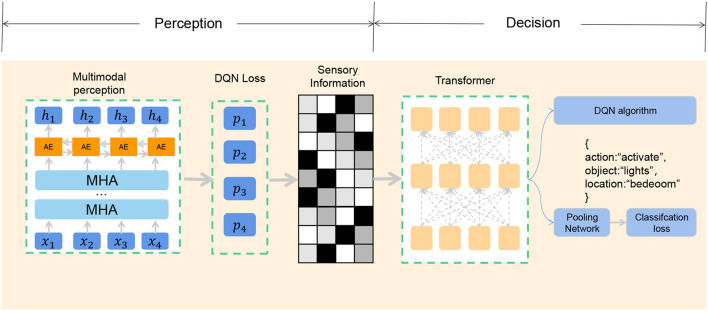
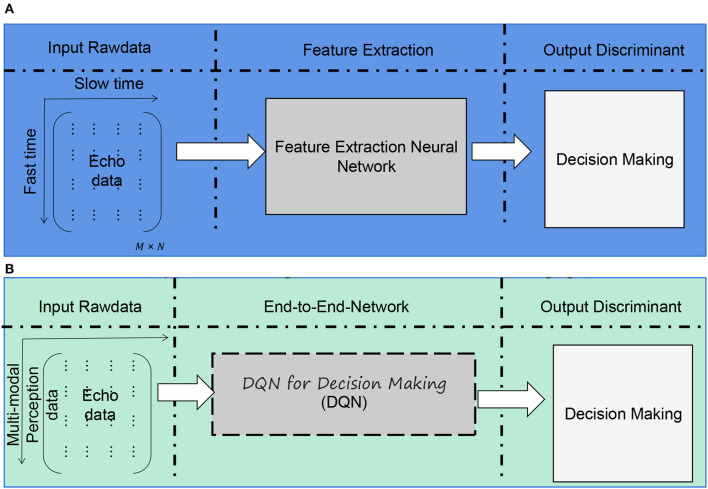
Methods: The proposed approach consists of three main components: multi-modal perception, deep reinforcement learning, and end-to-end architecture. Multi-modal perception leverages the multi-head attention mechanism (MATT) to merge visual, motion, and distance cues for a holistic perception of the basketball scenario. The deep reinforcement learning framework utilizes the Deep Q-Network (DQN) algorithm, enabling the robots to learn optimal shooting strategies over iterative interactions with the environment. The end-to-end architecture connects these components, allowing seamless integration of perception and decision-making processes.
Results: The experiments conducted demonstrate the effectiveness of the proposed approach. Basketball robots equipped with multi-modal perception and deep reinforcement learning exhibit improved shooting accuracy and enhanced decision-making abilities. The multi-head attention mechanism enhances the robots' perception of complex scenes, leading to more accurate shooting decisions. The application of the DQN algorithm results in gradual skill improvement and strategic optimization through interaction with the environment.
Discussion: The integration of multi-modal perception and deep reinforcement learning within an end-to-end architecture presents a promising avenue for advancing basketball robot training and performance. The ability to fuse diverse sensory inputs and learned strategies empowers robots to make informed decisions and execute accurate shots. The research not only contributes to the field of robotics but also has potential implications for human basketball training and coaching methodologies.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
