Lei Yang , Chao Lu , Guangming Xiong , Yang Xing , Jianwei Gong
{"title":"混合交通流下自动驾驶的混合运动规划框架","authors":"Lei Yang , Chao Lu , Guangming Xiong , Yang Xing , Jianwei Gong","doi":"10.1016/j.geits.2022.100022","DOIUrl":null,"url":null,"abstract":"<div><p>As a core part of an autonomous driving system, motion planning plays an important role in safe driving. However, traditional model- and rule-based methods lack the ability to learn interactively with the environment, and learning-based methods still have problems in terms of reliability. To overcome these problems, a hybrid motion planning framework (HMPF) is proposed to improve the performance of motion planning, which is composed of learning-based behavior planning and optimization-based trajectory planning. The behavior planning module adopts a deep reinforcement learning (DRL) algorithm, which can learn from the interaction between the ego vehicle (EV) and other human-driven vehicles (HDVs), and generate behavior decision commands based on environmental perception information. In particular, the intelligent driver model (IDM) calibrated based on real driving data is used to drive HDVs to imitate human driving behavior and interactive response, so as to simulate the bidirectional interaction between EV and HDVs. Meanwhile, trajectory planning module adopts the optimization method based on road Frenet coordinates, which can generate safe and comfortable desired trajectory while reducing the solution dimension of the problem. In addition, trajectory planning also exists as a safety hard constraint of behavior planning to ensure the feasibility of decision instruction. The experimental results demonstrate the effectiveness and feasibility of the proposed HMPF for autonomous driving motion planning in urban mixed traffic flow scenarios.</p></div>","PeriodicalId":100596,"journal":{"name":"Green Energy and Intelligent Transportation","volume":"1 3","pages":"Article 100022"},"PeriodicalIF":16.4000,"publicationDate":"2022-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2773153722000226/pdfft?md5=0012d1b315e0461d4f8ec9dd7333de19&pid=1-s2.0-S2773153722000226-main.pdf","citationCount":"2","resultStr":"{\"title\":\"A hybrid motion planning framework for autonomous driving in mixed traffic flow\",\"authors\":\"Lei Yang , Chao Lu , Guangming Xiong , Yang Xing , Jianwei Gong\",\"doi\":\"10.1016/j.geits.2022.100022\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>As a core part of an autonomous driving system, motion planning plays an important role in safe driving. However, traditional model- and rule-based methods lack the ability to learn interactively with the environment, and learning-based methods still have problems in terms of reliability. To overcome these problems, a hybrid motion planning framework (HMPF) is proposed to improve the performance of motion planning, which is composed of learning-based behavior planning and optimization-based trajectory planning. The behavior planning module adopts a deep reinforcement learning (DRL) algorithm, which can learn from the interaction between the ego vehicle (EV) and other human-driven vehicles (HDVs), and generate behavior decision commands based on environmental perception information. In particular, the intelligent driver model (IDM) calibrated based on real driving data is used to drive HDVs to imitate human driving behavior and interactive response, so as to simulate the bidirectional interaction between EV and HDVs. Meanwhile, trajectory planning module adopts the optimization method based on road Frenet coordinates, which can generate safe and comfortable desired trajectory while reducing the solution dimension of the problem. In addition, trajectory planning also exists as a safety hard constraint of behavior planning to ensure the feasibility of decision instruction. The experimental results demonstrate the effectiveness and feasibility of the proposed HMPF for autonomous driving motion planning in urban mixed traffic flow scenarios.</p></div>\",\"PeriodicalId\":100596,\"journal\":{\"name\":\"Green Energy and Intelligent Transportation\",\"volume\":\"1 3\",\"pages\":\"Article 100022\"},\"PeriodicalIF\":16.4000,\"publicationDate\":\"2022-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2773153722000226/pdfft?md5=0012d1b315e0461d4f8ec9dd7333de19&pid=1-s2.0-S2773153722000226-main.pdf\",\"citationCount\":\"2\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Green Energy and Intelligent Transportation\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2773153722000226\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2022/8/27 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Green Energy and Intelligent Transportation","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2773153722000226","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/8/27 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
A hybrid motion planning framework for autonomous driving in mixed traffic flow
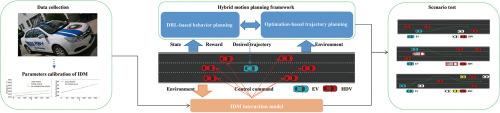
As a core part of an autonomous driving system, motion planning plays an important role in safe driving. However, traditional model- and rule-based methods lack the ability to learn interactively with the environment, and learning-based methods still have problems in terms of reliability. To overcome these problems, a hybrid motion planning framework (HMPF) is proposed to improve the performance of motion planning, which is composed of learning-based behavior planning and optimization-based trajectory planning. The behavior planning module adopts a deep reinforcement learning (DRL) algorithm, which can learn from the interaction between the ego vehicle (EV) and other human-driven vehicles (HDVs), and generate behavior decision commands based on environmental perception information. In particular, the intelligent driver model (IDM) calibrated based on real driving data is used to drive HDVs to imitate human driving behavior and interactive response, so as to simulate the bidirectional interaction between EV and HDVs. Meanwhile, trajectory planning module adopts the optimization method based on road Frenet coordinates, which can generate safe and comfortable desired trajectory while reducing the solution dimension of the problem. In addition, trajectory planning also exists as a safety hard constraint of behavior planning to ensure the feasibility of decision instruction. The experimental results demonstrate the effectiveness and feasibility of the proposed HMPF for autonomous driving motion planning in urban mixed traffic flow scenarios.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
