{"title":"3D打印声学可编程软微致动器。","authors":"Murat Kaynak, Amit Dolev, Mahmut Selman Sakar","doi":"10.1089/soro.2021.0193","DOIUrl":null,"url":null,"abstract":"<p><p>The concept of creating all-mechanical soft microrobotic systems has great potential to address outstanding challenges in biomedical applications, and introduce more sustainable and multifunctional products. To this end, magnetic fields and light have been extensively studied as potential energy sources. On the other hand, coupling the response of materials to pressure waves has been overlooked despite the abundant use of acoustics in nature and engineering solutions. In this study, we show that programmed commands can be contained on 3D nanoprinted polymer systems with the introduction of selectively excited air bubbles and rationally designed compliant mechanisms. A repertoire of micromechanical systems is engineered using experimentally validated computational models that consider the effects of primary and secondary pressure fields on entrapped air bubbles and the surrounding fluid. Coupling the dynamics of bubble oscillators reveals rich acoustofluidic interactions that can be programmed in space and time. We prescribe kinematics by harnessing the forces generated through these interactions to deform structural elements, which can be remotely reconfigured on demand with the incorporation of mechanical switches. These basic actuation and analog control modules will serve as the building blocks for the development of a novel class of micromechanical systems powered and programmed by acoustic signals.</p>","PeriodicalId":48685,"journal":{"name":"Soft Robotics","volume":"10 2","pages":"246-257"},"PeriodicalIF":6.4000,"publicationDate":"2023-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/d5/a4/soro.2021.0193.PMC10123809.pdf","citationCount":"4","resultStr":"{\"title\":\"3D Printed Acoustically Programmable Soft Microactuators.\",\"authors\":\"Murat Kaynak, Amit Dolev, Mahmut Selman Sakar\",\"doi\":\"10.1089/soro.2021.0193\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The concept of creating all-mechanical soft microrobotic systems has great potential to address outstanding challenges in biomedical applications, and introduce more sustainable and multifunctional products. To this end, magnetic fields and light have been extensively studied as potential energy sources. On the other hand, coupling the response of materials to pressure waves has been overlooked despite the abundant use of acoustics in nature and engineering solutions. In this study, we show that programmed commands can be contained on 3D nanoprinted polymer systems with the introduction of selectively excited air bubbles and rationally designed compliant mechanisms. A repertoire of micromechanical systems is engineered using experimentally validated computational models that consider the effects of primary and secondary pressure fields on entrapped air bubbles and the surrounding fluid. Coupling the dynamics of bubble oscillators reveals rich acoustofluidic interactions that can be programmed in space and time. We prescribe kinematics by harnessing the forces generated through these interactions to deform structural elements, which can be remotely reconfigured on demand with the incorporation of mechanical switches. These basic actuation and analog control modules will serve as the building blocks for the development of a novel class of micromechanical systems powered and programmed by acoustic signals.</p>\",\"PeriodicalId\":48685,\"journal\":{\"name\":\"Soft Robotics\",\"volume\":\"10 2\",\"pages\":\"246-257\"},\"PeriodicalIF\":6.4000,\"publicationDate\":\"2023-04-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/d5/a4/soro.2021.0193.PMC10123809.pdf\",\"citationCount\":\"4\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Soft Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1089/soro.2021.0193\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Soft Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1089/soro.2021.0193","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
3D Printed Acoustically Programmable Soft Microactuators.
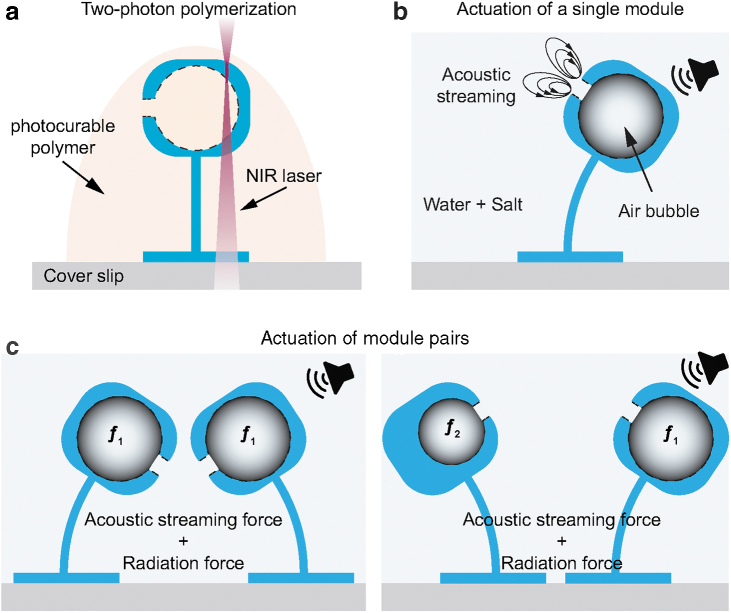
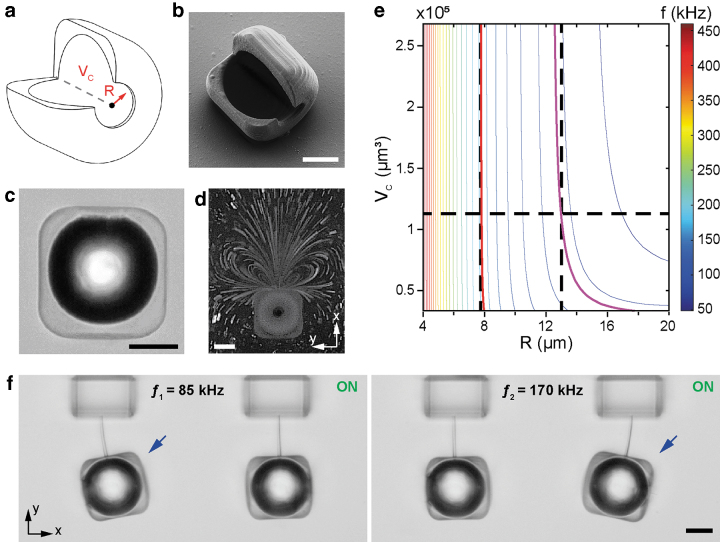
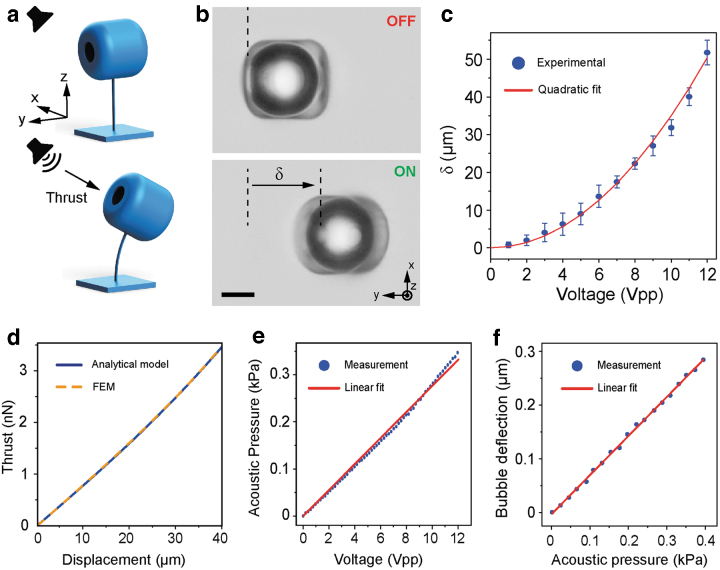
The concept of creating all-mechanical soft microrobotic systems has great potential to address outstanding challenges in biomedical applications, and introduce more sustainable and multifunctional products. To this end, magnetic fields and light have been extensively studied as potential energy sources. On the other hand, coupling the response of materials to pressure waves has been overlooked despite the abundant use of acoustics in nature and engineering solutions. In this study, we show that programmed commands can be contained on 3D nanoprinted polymer systems with the introduction of selectively excited air bubbles and rationally designed compliant mechanisms. A repertoire of micromechanical systems is engineered using experimentally validated computational models that consider the effects of primary and secondary pressure fields on entrapped air bubbles and the surrounding fluid. Coupling the dynamics of bubble oscillators reveals rich acoustofluidic interactions that can be programmed in space and time. We prescribe kinematics by harnessing the forces generated through these interactions to deform structural elements, which can be remotely reconfigured on demand with the incorporation of mechanical switches. These basic actuation and analog control modules will serve as the building blocks for the development of a novel class of micromechanical systems powered and programmed by acoustic signals.
期刊介绍:
Soft Robotics (SoRo) stands as a premier robotics journal, showcasing top-tier, peer-reviewed research on the forefront of soft and deformable robotics. Encompassing flexible electronics, materials science, computer science, and biomechanics, it pioneers breakthroughs in robotic technology capable of safe interaction with living systems and navigating complex environments, natural or human-made.
With a multidisciplinary approach, SoRo integrates advancements in biomedical engineering, biomechanics, mathematical modeling, biopolymer chemistry, computer science, and tissue engineering, offering comprehensive insights into constructing adaptable devices that can undergo significant changes in shape and size. This transformative technology finds critical applications in surgery, assistive healthcare devices, emergency search and rescue, space instrument repair, mine detection, and beyond.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
