Silvia Filogna, Linda Paternò, Fabrizio Vecchi, Luigi Musco, Veronica Iacovacci, Arianna Menciassi
{"title":"一种仿生充液软线性驱动器。","authors":"Silvia Filogna, Linda Paternò, Fabrizio Vecchi, Luigi Musco, Veronica Iacovacci, Arianna Menciassi","doi":"10.1089/soro.2021.0091","DOIUrl":null,"url":null,"abstract":"<p><p>In bioinspired soft robotics, very few studies have focused on fluidic transmissions and there is an urgent need for translating fluidic concepts into realizable fluidic components to be applied in different fields. Nature has often offered an inspiring reference to design new efficient devices. Inspired by the working principle of a marine worm, the sipunculid species <i>Phascolosoma stephensoni</i> (Sipunculidae, Annelida), a soft linear fluidic actuator is here presented. The natural hydrostatic skeleton combined with muscle activity enables these organisms to protrude a part of their body to explore the surrounding. Looking at the hydrostatic skeleton and protrusion mechanism of sipunculids, our solution is based on a twofold fluidic component, exploiting the advantages of both pneumatic and hydraulic actuations and providing a novel fluidic transmission mechanism. The inflation of a soft pneumatic chamber is associated with the stretch of an inner hydraulic chamber due to the incompressibility of the liquid. Actuator stretch and forces have been characterized to determine system performance. In addition, an analytical model has been derived to relate the stretch ability to the inlet pressure. Three different sizes of prototypes were tested to evaluate the suitability of the proposed design for miniaturization. The proposed actuator features a strain equal to 40-50% of its initial length-depending on size-and output forces up to 18 N in the largest prototypes. The proposed bioinspired actuator expands the design of fluidic actuators and can pave the way for new approaches in soft robotics with potential application in the medical field.</p>","PeriodicalId":48685,"journal":{"name":"Soft Robotics","volume":"10 3","pages":"454-466"},"PeriodicalIF":6.1000,"publicationDate":"2023-06-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10278000/pdf/","citationCount":"3","resultStr":"{\"title\":\"A Bioinspired Fluid-Filled Soft Linear Actuator.\",\"authors\":\"Silvia Filogna, Linda Paternò, Fabrizio Vecchi, Luigi Musco, Veronica Iacovacci, Arianna Menciassi\",\"doi\":\"10.1089/soro.2021.0091\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>In bioinspired soft robotics, very few studies have focused on fluidic transmissions and there is an urgent need for translating fluidic concepts into realizable fluidic components to be applied in different fields. Nature has often offered an inspiring reference to design new efficient devices. Inspired by the working principle of a marine worm, the sipunculid species <i>Phascolosoma stephensoni</i> (Sipunculidae, Annelida), a soft linear fluidic actuator is here presented. The natural hydrostatic skeleton combined with muscle activity enables these organisms to protrude a part of their body to explore the surrounding. Looking at the hydrostatic skeleton and protrusion mechanism of sipunculids, our solution is based on a twofold fluidic component, exploiting the advantages of both pneumatic and hydraulic actuations and providing a novel fluidic transmission mechanism. The inflation of a soft pneumatic chamber is associated with the stretch of an inner hydraulic chamber due to the incompressibility of the liquid. Actuator stretch and forces have been characterized to determine system performance. In addition, an analytical model has been derived to relate the stretch ability to the inlet pressure. Three different sizes of prototypes were tested to evaluate the suitability of the proposed design for miniaturization. The proposed actuator features a strain equal to 40-50% of its initial length-depending on size-and output forces up to 18 N in the largest prototypes. The proposed bioinspired actuator expands the design of fluidic actuators and can pave the way for new approaches in soft robotics with potential application in the medical field.</p>\",\"PeriodicalId\":48685,\"journal\":{\"name\":\"Soft Robotics\",\"volume\":\"10 3\",\"pages\":\"454-466\"},\"PeriodicalIF\":6.1000,\"publicationDate\":\"2023-06-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10278000/pdf/\",\"citationCount\":\"3\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Soft Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1089/soro.2021.0091\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Soft Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1089/soro.2021.0091","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ROBOTICS","Score":null,"Total":0}
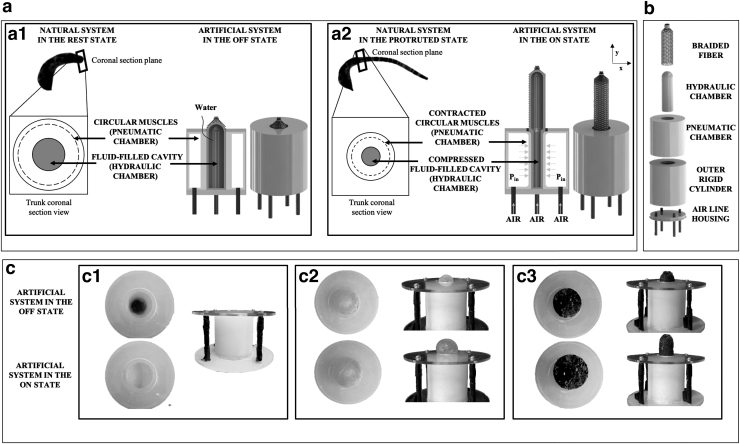
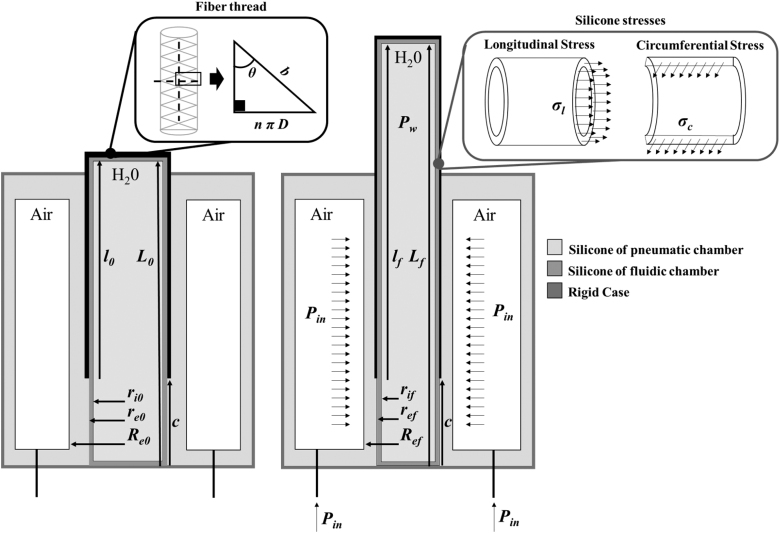
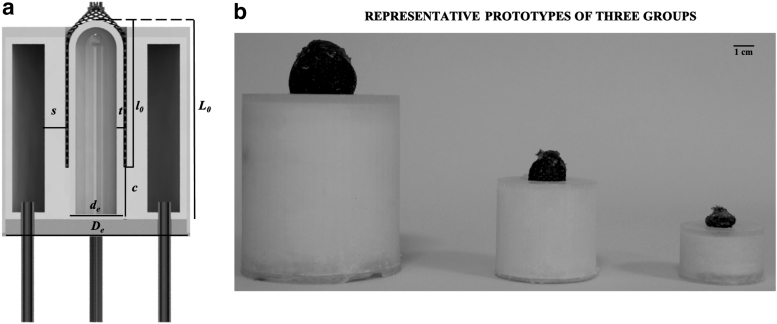
In bioinspired soft robotics, very few studies have focused on fluidic transmissions and there is an urgent need for translating fluidic concepts into realizable fluidic components to be applied in different fields. Nature has often offered an inspiring reference to design new efficient devices. Inspired by the working principle of a marine worm, the sipunculid species Phascolosoma stephensoni (Sipunculidae, Annelida), a soft linear fluidic actuator is here presented. The natural hydrostatic skeleton combined with muscle activity enables these organisms to protrude a part of their body to explore the surrounding. Looking at the hydrostatic skeleton and protrusion mechanism of sipunculids, our solution is based on a twofold fluidic component, exploiting the advantages of both pneumatic and hydraulic actuations and providing a novel fluidic transmission mechanism. The inflation of a soft pneumatic chamber is associated with the stretch of an inner hydraulic chamber due to the incompressibility of the liquid. Actuator stretch and forces have been characterized to determine system performance. In addition, an analytical model has been derived to relate the stretch ability to the inlet pressure. Three different sizes of prototypes were tested to evaluate the suitability of the proposed design for miniaturization. The proposed actuator features a strain equal to 40-50% of its initial length-depending on size-and output forces up to 18 N in the largest prototypes. The proposed bioinspired actuator expands the design of fluidic actuators and can pave the way for new approaches in soft robotics with potential application in the medical field.
期刊介绍:
Soft Robotics (SoRo) stands as a premier robotics journal, showcasing top-tier, peer-reviewed research on the forefront of soft and deformable robotics. Encompassing flexible electronics, materials science, computer science, and biomechanics, it pioneers breakthroughs in robotic technology capable of safe interaction with living systems and navigating complex environments, natural or human-made.
With a multidisciplinary approach, SoRo integrates advancements in biomedical engineering, biomechanics, mathematical modeling, biopolymer chemistry, computer science, and tissue engineering, offering comprehensive insights into constructing adaptable devices that can undergo significant changes in shape and size. This transformative technology finds critical applications in surgery, assistive healthcare devices, emergency search and rescue, space instrument repair, mine detection, and beyond.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
