Daniel J L L Pinheiro, Jean Faber, Silvestro Micera, Solaiman Shokur
{"title":"利用耳肌进行二维转向控制的人机界面。","authors":"Daniel J L L Pinheiro, Jean Faber, Silvestro Micera, Solaiman Shokur","doi":"10.3389/fnbot.2023.1154427","DOIUrl":null,"url":null,"abstract":"<p><p>Human-machine interfaces (HMIs) can be used to decode a user's motor intention to control an external device. People that suffer from motor disabilities, such as spinal cord injury, can benefit from the uses of these interfaces. While many solutions can be found in this direction, there is still room for improvement both from a decoding, hardware, and subject-motor learning perspective. Here we show, in a series of experiments with non-disabled participants, a novel decoding and training paradigm allowing naïve participants to use their auricular muscles (AM) to control two degrees of freedom with a virtual cursor. AMs are particularly interesting because they are vestigial muscles and are often preserved after neurological diseases. Our method relies on the use of surface electromyographic records and the use of contraction levels of both AMs to modulate the velocity and direction of a cursor in a two-dimensional paradigm. We used a locking mechanism to fix the current position of each axis separately to enable the user to stop the cursor at a certain location. A five-session training procedure (20-30 min per session) with a 2D center-out task was performed by five volunteers. All participants increased their success rate (Initial: 52.78 ± 5.56%; Final: 72.22 ± 6.67%; median ± median absolute deviation) and their trajectory performances throughout the training. We implemented a dual task with visual distractors to assess the mental challenge of controlling while executing another task; our results suggest that the participants could perform the task in cognitively demanding conditions (success rate of 66.67 ± 5.56%). Finally, using the Nasa Task Load Index questionnaire, we found that participants reported lower mental demand and effort in the last two sessions. To summarize, all subjects could learn to control the movement of a cursor with two degrees of freedom using their AM, with a low impact on the cognitive load. Our study is a first step in developing AM-based decoders for HMIs for people with motor disabilities, such as spinal cord injury.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"17 ","pages":"1154427"},"PeriodicalIF":2.8000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10277645/pdf/","citationCount":"1","resultStr":"{\"title\":\"Human-machine interface for two-dimensional steering control with the auricular muscles.\",\"authors\":\"Daniel J L L Pinheiro, Jean Faber, Silvestro Micera, Solaiman Shokur\",\"doi\":\"10.3389/fnbot.2023.1154427\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Human-machine interfaces (HMIs) can be used to decode a user's motor intention to control an external device. People that suffer from motor disabilities, such as spinal cord injury, can benefit from the uses of these interfaces. While many solutions can be found in this direction, there is still room for improvement both from a decoding, hardware, and subject-motor learning perspective. Here we show, in a series of experiments with non-disabled participants, a novel decoding and training paradigm allowing naïve participants to use their auricular muscles (AM) to control two degrees of freedom with a virtual cursor. AMs are particularly interesting because they are vestigial muscles and are often preserved after neurological diseases. Our method relies on the use of surface electromyographic records and the use of contraction levels of both AMs to modulate the velocity and direction of a cursor in a two-dimensional paradigm. We used a locking mechanism to fix the current position of each axis separately to enable the user to stop the cursor at a certain location. A five-session training procedure (20-30 min per session) with a 2D center-out task was performed by five volunteers. All participants increased their success rate (Initial: 52.78 ± 5.56%; Final: 72.22 ± 6.67%; median ± median absolute deviation) and their trajectory performances throughout the training. We implemented a dual task with visual distractors to assess the mental challenge of controlling while executing another task; our results suggest that the participants could perform the task in cognitively demanding conditions (success rate of 66.67 ± 5.56%). Finally, using the Nasa Task Load Index questionnaire, we found that participants reported lower mental demand and effort in the last two sessions. To summarize, all subjects could learn to control the movement of a cursor with two degrees of freedom using their AM, with a low impact on the cognitive load. Our study is a first step in developing AM-based decoders for HMIs for people with motor disabilities, such as spinal cord injury.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"17 \",\"pages\":\"1154427\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2023-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10277645/pdf/\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2023.1154427\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2023.1154427","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Human-machine interface for two-dimensional steering control with the auricular muscles.
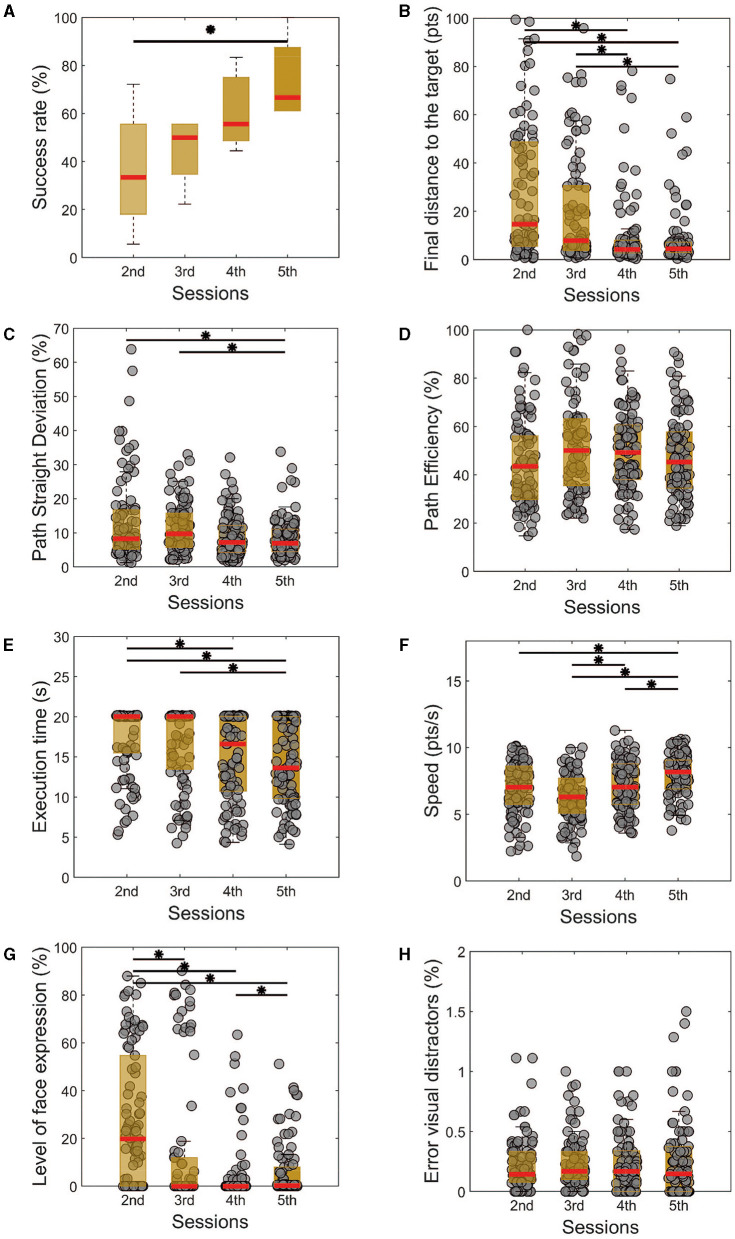
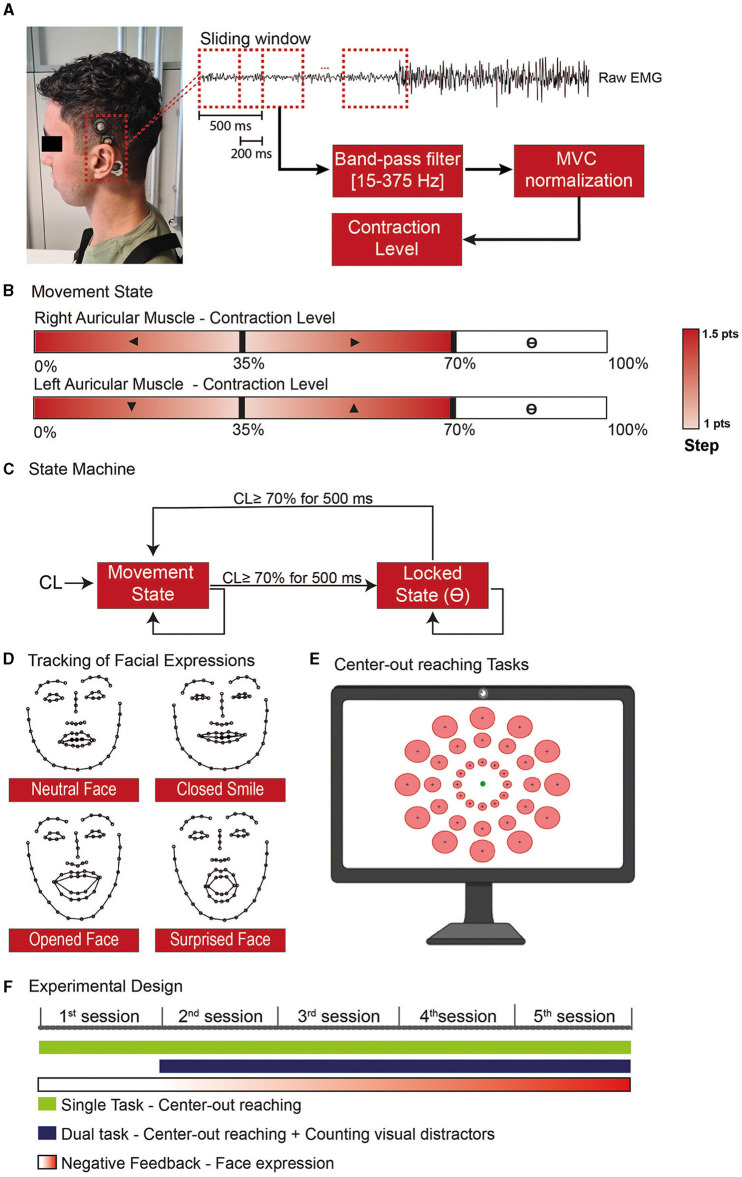
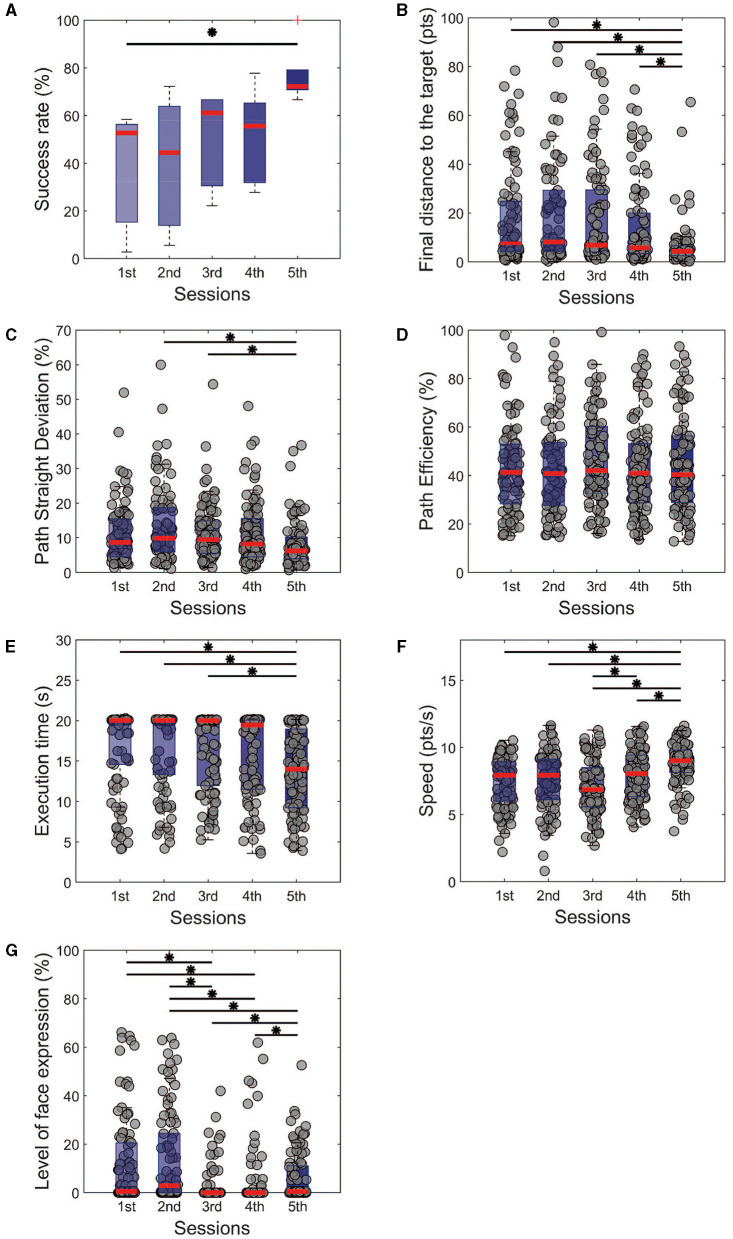
Human-machine interfaces (HMIs) can be used to decode a user's motor intention to control an external device. People that suffer from motor disabilities, such as spinal cord injury, can benefit from the uses of these interfaces. While many solutions can be found in this direction, there is still room for improvement both from a decoding, hardware, and subject-motor learning perspective. Here we show, in a series of experiments with non-disabled participants, a novel decoding and training paradigm allowing naïve participants to use their auricular muscles (AM) to control two degrees of freedom with a virtual cursor. AMs are particularly interesting because they are vestigial muscles and are often preserved after neurological diseases. Our method relies on the use of surface electromyographic records and the use of contraction levels of both AMs to modulate the velocity and direction of a cursor in a two-dimensional paradigm. We used a locking mechanism to fix the current position of each axis separately to enable the user to stop the cursor at a certain location. A five-session training procedure (20-30 min per session) with a 2D center-out task was performed by five volunteers. All participants increased their success rate (Initial: 52.78 ± 5.56%; Final: 72.22 ± 6.67%; median ± median absolute deviation) and their trajectory performances throughout the training. We implemented a dual task with visual distractors to assess the mental challenge of controlling while executing another task; our results suggest that the participants could perform the task in cognitively demanding conditions (success rate of 66.67 ± 5.56%). Finally, using the Nasa Task Load Index questionnaire, we found that participants reported lower mental demand and effort in the last two sessions. To summarize, all subjects could learn to control the movement of a cursor with two degrees of freedom using their AM, with a low impact on the cognitive load. Our study is a first step in developing AM-based decoders for HMIs for people with motor disabilities, such as spinal cord injury.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
