Ang Chen, Bifeng Song, Zhihe Wang, Kang Liu, Dong Xue, Xiaojun Yang
{"title":"Experimental Study on the Effect of Increased Downstroke Duration for an FWAV with Morphing-coupled Wing Flapping Configuration","authors":"Ang Chen, Bifeng Song, Zhihe Wang, Kang Liu, Dong Xue, Xiaojun Yang","doi":"10.1007/s42235-023-00443-w","DOIUrl":null,"url":null,"abstract":"<div><p>This paper is based on a previously developed bio-inspired Flapping Wing Aerial Vehicle (FWAV), RoboFalcon, which can fly with a morphing-coupled flapping pattern. In this paper, a simple flapping stroke control system based on Hall effect sensors is designed and applied, which is capable of assigning different up- and down-stroke speeds for the RoboFalcon platform to achieve an adjustable downstroke ratio. The aerodynamic and power characteristics of the morphing-coupled flapping pattern and the conventional flapping pattern with varying downstroke ratios are measured through a wind tunnel experiment, and the corresponding aerodynamic models are developed and analyzed by the nonlinear least squares method. The relatively low power consumption of the slow-downstroke mode of this vehicle is verified through outdoor flight tests. The results of wind tunnel experiments and flight tests indicate that increased downstroke duration can improve aerodynamic and power performance for the RoboFalcon platform.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 1","pages":"192 - 208"},"PeriodicalIF":5.8000,"publicationDate":"2023-10-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-023-00443-w","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
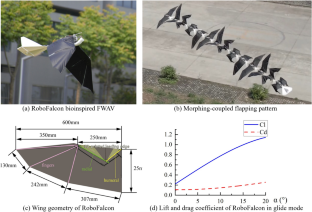
This paper is based on a previously developed bio-inspired Flapping Wing Aerial Vehicle (FWAV), RoboFalcon, which can fly with a morphing-coupled flapping pattern. In this paper, a simple flapping stroke control system based on Hall effect sensors is designed and applied, which is capable of assigning different up- and down-stroke speeds for the RoboFalcon platform to achieve an adjustable downstroke ratio. The aerodynamic and power characteristics of the morphing-coupled flapping pattern and the conventional flapping pattern with varying downstroke ratios are measured through a wind tunnel experiment, and the corresponding aerodynamic models are developed and analyzed by the nonlinear least squares method. The relatively low power consumption of the slow-downstroke mode of this vehicle is verified through outdoor flight tests. The results of wind tunnel experiments and flight tests indicate that increased downstroke duration can improve aerodynamic and power performance for the RoboFalcon platform.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
