Yizhuo Xu, Shanfei Zhang, Shuya Li, Zhenhua Wu, Yike Li, Zhuofan Li, Xiaojun Chen, Congcan Shi, Peng Chen, Pengyu Zhang, Michael D. Dickey, Bin Su
{"title":"A soft magnetoelectric finger for robots’ multidirectional tactile perception in non-visual recognition environments","authors":"Yizhuo Xu, Shanfei Zhang, Shuya Li, Zhenhua Wu, Yike Li, Zhuofan Li, Xiaojun Chen, Congcan Shi, Peng Chen, Pengyu Zhang, Michael D. Dickey, Bin Su","doi":"10.1038/s41528-023-00289-6","DOIUrl":null,"url":null,"abstract":"Robotic fingers with multidirectional tactile perception are of great importance for the robotic exploration of complex unknown space, especially in environments in which visualization is not possible. Unfortunately, most existing tactile sensors for robotic fingers cannot detect multidirectional forces, which greatly limits their potential for further development in navigating complex environments. Here, we demonstrate a soft magnetoelectric finger (SMF) that can achieve self-generated-signal and multidirectional tactile sensing. The SMF is composed of two parts: a ‘finger’ covered with a skin-like flexible sheath containing five liquid metal (LM) coils and a ‘phalangeal bone’ containing a magnet. Due to the changes in magnetic flux through the LM coils caused by external forces, diverse induced voltages are generated and collected in real-time, which can be explained by Maxwell’s numerical simulation. By the analysis of the signals generated by the five LM coils, the SMF can detect forces in varied directions and distinguish 6 different common objects with varied Young’s moduli with an accuracy of 97.46%. These capabilities make the SMF suitable for complex unknown space exploration tasks, as proved by the black box exploration. The SMF can enable the development of self-generated-signal and multidirectional tactile perception for future robots.","PeriodicalId":48528,"journal":{"name":"npj Flexible Electronics","volume":" ","pages":"1-11"},"PeriodicalIF":15.5000,"publicationDate":"2024-01-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s41528-023-00289-6.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"npj Flexible Electronics","FirstCategoryId":"88","ListUrlMain":"https://www.nature.com/articles/s41528-023-00289-6","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
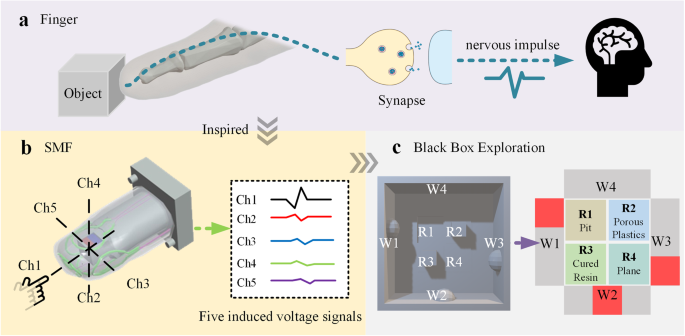
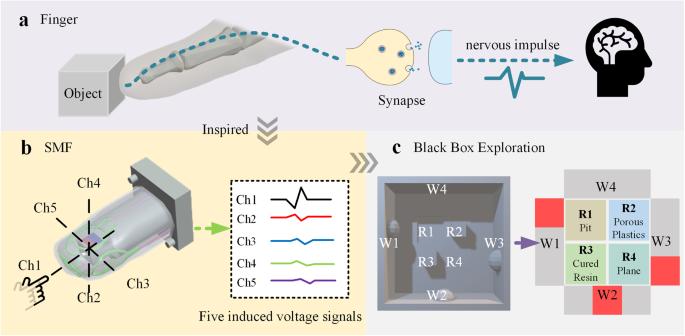
Robotic fingers with multidirectional tactile perception are of great importance for the robotic exploration of complex unknown space, especially in environments in which visualization is not possible. Unfortunately, most existing tactile sensors for robotic fingers cannot detect multidirectional forces, which greatly limits their potential for further development in navigating complex environments. Here, we demonstrate a soft magnetoelectric finger (SMF) that can achieve self-generated-signal and multidirectional tactile sensing. The SMF is composed of two parts: a ‘finger’ covered with a skin-like flexible sheath containing five liquid metal (LM) coils and a ‘phalangeal bone’ containing a magnet. Due to the changes in magnetic flux through the LM coils caused by external forces, diverse induced voltages are generated and collected in real-time, which can be explained by Maxwell’s numerical simulation. By the analysis of the signals generated by the five LM coils, the SMF can detect forces in varied directions and distinguish 6 different common objects with varied Young’s moduli with an accuracy of 97.46%. These capabilities make the SMF suitable for complex unknown space exploration tasks, as proved by the black box exploration. The SMF can enable the development of self-generated-signal and multidirectional tactile perception for future robots.
期刊介绍:
npj Flexible Electronics is an online-only and open access journal, which publishes high-quality papers related to flexible electronic systems, including plastic electronics and emerging materials, new device design and fabrication technologies, and applications.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
